
Robohub.org
Multi-purpose wings allow flying robot to walk across rough terrain
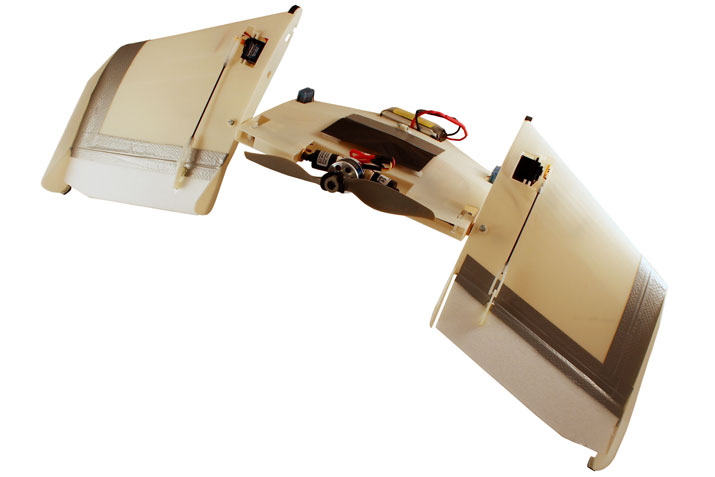
The Deployable Air Land Exploration Robot (DALER) uses its own wings to crawl and roll over a variety of terrains. Using a self-adjusting structure to transform its wings into rotating arms, the robot is able to flip, rotate and navigate its way around and over obstacles on the ground. Sharing the wings across different modes of locomotion reduces the amount of infrastructure and weight the robot must carry, thus improving flight performance. The ability to adapt to a variety of environments is important in search and rescue operations, where both air and ground searching may be required.
In applications such as exploration, search-and-rescue, or environmental monitoring, robots must be able to deal with very complex terrains, such as semi-collapsed buildings, deep caverns, or forests with heavy vegetation. Autonomous robots that can operate both in the air and on the ground are ideal for navigating these kinds of locations — for example, a robot may be needed to fly over a large forest, and then explore areas below the tree canopy. While many dual-locomotion systems already exist, most of these simply add specialized hardware for each locomotion method used (such as wings and wheels), adding both infrastructure and weight to the overall system, and hindering flight performance. Instead, DALER uses just one structure — the wing — to both walk and fly. This design approach is an example of “adaptive morphology”, where one part of a robot’s structure is adaptable and shared between different modes of operation.
The DALER is currently optimized for ground speed. The prototype shown in the video above can move forward at 0.2 m/s (0.7 BL/s), can rotate on spot at 25°/s, and is capable of walking with different gaits. Future iterations of the robot will focus on increasing the adaptability of the wings to improve forward flight, hover flight and displacement on the ground. For example, wings could be fully deployed for flying outdoors and reduced for hover flight and ground modes.
The DALER was developed at the Laboratory of Intelligent Systems at EPFL in Lausanne, Switzerland, where researchers investigate bio-inspired artificial intelligence, develop autonomous robotic systems, and address biological questions using computational and robotic models.
If you liked this article, you may also be interested in:
- Insect-inspired flying robot handles collisions, goes where other robots can’t
- First controlled flight of an insect-sized robot
- Parrot AR.Drone app harnesses crowd power to fast-track vision learning in robotic spacecraft
- Robots Podcast: Origami robots
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: adaptive morphology, c-Research-Innovation, cx-Aerial, cx-Education-DIY, EPFL, Flying, multimodal, search and rescue




