
Robohub.org
A fleet of miniature cars for experiments in cooperative driving
 The deployment of connected, automated, and autonomous vehicles presents us with transformational opportunities for road transport. These opportunities reach beyond single-vehicle automation: by enabling groups of vehicles to jointly agree on maneuvers and navigation strategies, real-time coordination promises to improve overall traffic throughput, road capacity, and passenger safety. However, coordinated driving for intelligent vehicles still remains a challenging research problem, and testing new approaches is cumbersome. Developing true-scale facilities for safe, controlled vehicle testbeds is massively expensive and requires a vast amount of space. One approach to facilitating experimental research and education is to build low-cost testbeds that incorporate fleets of down-sized, car-like mobile platforms.
The deployment of connected, automated, and autonomous vehicles presents us with transformational opportunities for road transport. These opportunities reach beyond single-vehicle automation: by enabling groups of vehicles to jointly agree on maneuvers and navigation strategies, real-time coordination promises to improve overall traffic throughput, road capacity, and passenger safety. However, coordinated driving for intelligent vehicles still remains a challenging research problem, and testing new approaches is cumbersome. Developing true-scale facilities for safe, controlled vehicle testbeds is massively expensive and requires a vast amount of space. One approach to facilitating experimental research and education is to build low-cost testbeds that incorporate fleets of down-sized, car-like mobile platforms.
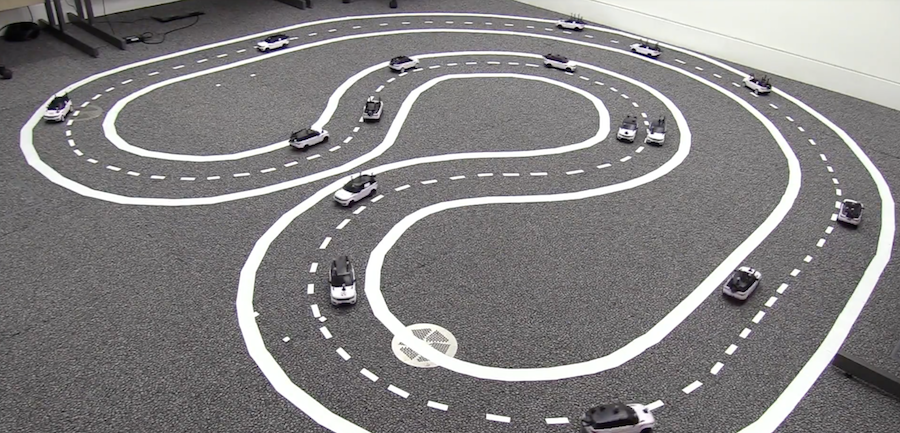
Following this idea, our lab (with key contributions by Nicholas Hyldmar and Yijun He) developed a multi-car testbed that allows for the operation of tens of vehicles within the space of a moderately large robotics laboratory. This testbed facilitates the development of coordinated driving strategies in dense traffic scenarios, and enables us to test the effects of vehicle-vehicle interactions (cooperative as well as non-cooperative). Our robotic car, the Cambridge Minicar, is based on a 1:24 model of an existing commercial car. The Minicar is an Ackermann-steering platform, and one out of very few openly available designs. It is built from off-the-shelf components (with the exception of one laser-cut piece), costs approximately US $76 in its basic configuration, and is especially attractive for robotics labs that already possess telemetry infrastructure. Its low cost enables the composition of large fleets, which can be used to test navigation strategies and driver models. Our Minicar design and code is available in an open-source repository (https://github.com/proroklab/minicar).
The movie above demonstrates the applicability of the testbed for large-fleet experimentation by implementing different driving schemes that lead to distinct traffic behaviors. Notably, in experiments on a fleet of 16 Minicars, we show the benefits of cooperative driving: when traffic disruptions occur, instead of queuing, a cooperative Minicar communicates its intention to lane-change; following vehicles in the new lane reduce their speeds to make space for this projected maneuver, hence maintaining traffic flow (and throughput), whilst ensuring safety.
tags: herotagrc



AUAI is supported by:









