
Robohub.org
Complex lattices that change in response to stimuli open a range of applications in electronics, robotics, and medicine
By Leah Burrows
What would it take to transform a flat sheet into a human face? How would the sheet need to grow and shrink to form eyes that are concave into the face and a convex nose and chin that protrude?
How to encode and release complex curves in shape-shifting structures is at the center of research led by the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) and Harvard’s Wyss Institute of Biologically Inspired Engineering.
Over the past decade, theorists and experimentalists have found inspiration in nature as they have sought to unravel the physics, build mathematical frameworks, and develop materials and 3D and 4D-printing techniques for structures that can change shape in response to external stimuli.
However, complex multi-scale curvature has remained out of reach.
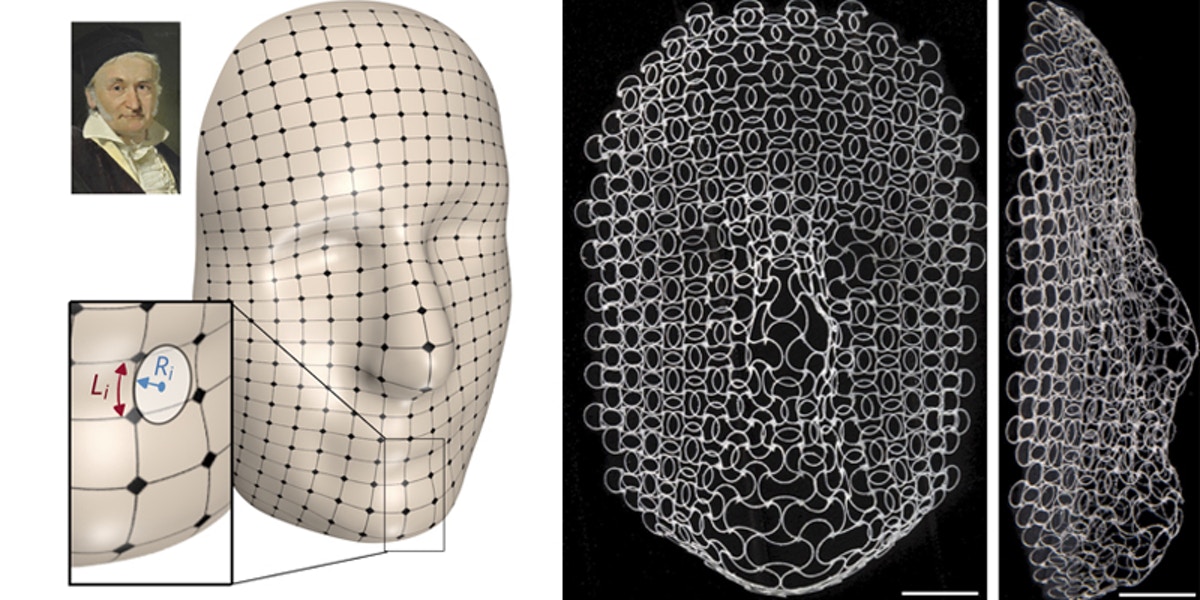
A portrait of Carl Friedrich Gauss painted by Christian Albrecht Jensen in 1840. The researchers generated a 3D surface via an artificial intelligence algorithm. The ribs in the different layers of the lattice are programmed to grow and shrink in response to a change in temperature, mapping the curves of Gauss’ face. Images courtesy of Lori Sanders/Harvard SEAS
Now, researchers have created the most complex shape-shifting structures to date — lattices composed of multiple materials that grow or shrink in response to changes in temperature. To demonstrate their technique, team printed flat lattices that shape morph into a frequency-shifting antenna or the face of pioneering mathematician Carl Friedrich Gauss in response to a change in temperature.
The research is published in the Proceedings of the National Academy of Sciences.
“Form both enables and constrains function,” said L Mahadevan, Ph.D., the de Valpine Professor of Applied Mathematics, and Professor of Physics and Organismic and Evolutionary Biology at Harvard. “Using mathematics and computation to design form, and a combination of multi-scale geometry and multi-material printing to realize it, we are now able to build shape-shifting structures with the potential for a range of functions.”
“Together, we are creating new classes of shape-shifting matter,” said Jennifer A. Lewis, Sc.D., the Hansjörg Wyss Professor of Biologically Inspired Engineering at Harvard. “Using an integrated design and fabrication approach, we can encode complex ‘instruction sets’ within these printed materials that drive their shape-morphing behavior.”
Lewis is also a Core Faculty member of the Wyss Institute.
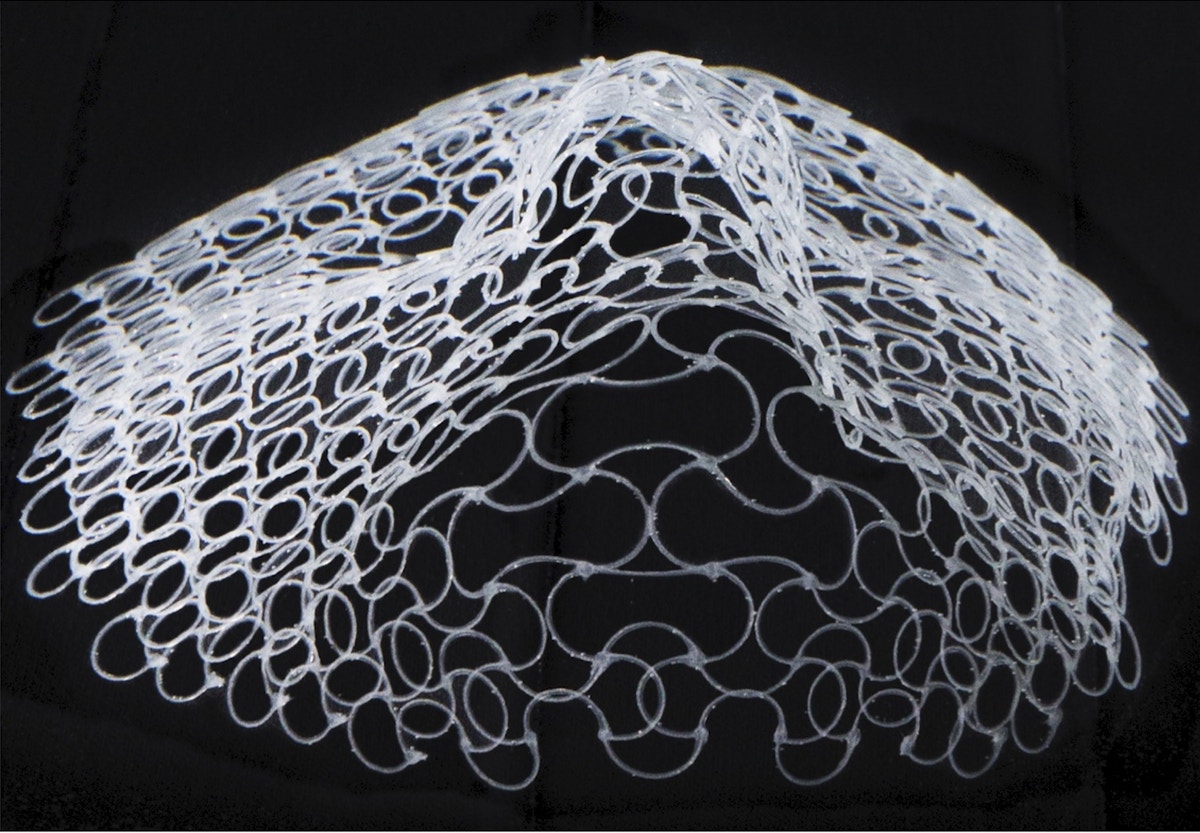
To create complex and doubly-curved shapes — such as those found on a face — the team turned to a bilayer, multimaterial lattice design.
“The open cells of the curved lattice give it the ability to grow or shrink a lot, even if the material itself undergoes limited extension,” said co-first author Wim M. van Rees, Ph.D., who was a postdoctoral fellow at SEAS and is now an Assistant Professor at MIT.
To achieve complex curves, growing and shrinking the lattice on its own isn’t enough. You need to be able to direct the growth locally.
“That’s where the materials palette that we’ve developed comes in,” said J. William Boley, Ph.D., a former postdoctoral fellow at SEAS and co-first author of the paper. “By printing materials with different thermal expansion behavior in pre-defined configurations, we can control the growth and shrinkage of each individual rib of the lattice, which in turn gives rise to complex bending of the printed lattice both within and out of plane.” Boley is now an Assistant Professor at Boston University.
The researchers used four different materials and programmed each rib of the lattice to change shape in response to a change in temperature. Using this method, they printed a shape-shifting patch antenna, which can change resonant frequencies as it changes shape.
To showcase the ability of the method to create a complex surface with multiscale curvature, the researchers printed the face of the 19th century mathematician who laid the foundations of differential geometry: Carl Friederich Gauss. Images courtesy of Lori Sanders/Harvard SEAS
To showcase the ability of the method to create a complex surface with multiscale curvature, the researchers decided to print a human face. They chose the face of the 19th century mathematician who laid the foundations of differential geometry: Carl Friederich Gauss. The researchers began with a 2D portrait of Gauss, painted in 1840, and generated a 3D surface using an open-source artificial intelligence algorithm. They then programmed the ribs in the different layers of the lattice to grow and shrink, mapping the curves of Gauss’ face.
This inverse design approach and multimaterial 4D printing method could be extended to other stimuli-responsive materials and be used to create scalable, reversible, shape-shifting structures with unprecedented complexity.
“Application areas include, soft electronics, smart fabrics, tissue engineering, robotics and beyond,” said Boley.
“This work was enabled by recent advances in posing and solving geometric inverse problems combined with 4D-printing technologies using multiple materials. Going forward, our hope is that this multi-disciplinary approach for shaping matter will be broadly adopted,” said Mahadevan.
This research was co-authored by Charles Lissandrello, Mark Horenstein, Ryan Truby, and Arda Kotikian. It was supported by the National Science Foundation and Draper Laboratory.
AUAI is supported by:









