
Robohub.org
euRathlon 2015 announces Grand Challenge winners

Torre del Sale, Piombino, was the location chosen for simulating the euRathlon’s Fukushima-like disaster. Photo Credit: euRathlon
Inspired by the 2011 Fukushima accident, the euRathlon competition is the first outdoor competition where teams of land, sea and air robots must cooperate in a realistic disaster-response scenario. Following participation in the trials and sub-challenges, six multi-domain teams attempted the Grand Challenge, where they were required to locate missing workers, map a building and identify critical hazards, and inspect land and underwater pipes and stem a leak, all within 100 minutes. Watch the Grand Challenge video recaps and find out the winning teams …

An example ‘Object of Potential Interest’, or OPI, the unblocked entrance was represented by a green rectangle. Photo credit: Joshua Davidson

ENSTA Bretagne Team 1 looking under water for a possible missing worker. Photo credit: euRathlon
The Grand Challenge
The seven partners of euRathlon consortium worked together for more than two years to design this unique disaster-response scenario, which comprised three realistic mission goals:
- Mission-A: Search for missing workers – Robots had to search for two missing workers represented by mannequins dressed in orange suits, which could be inside the building, outside the building, floating on the sea surface near the coast, or trapped underwater. Teams received bonus points if a worker was found during the first 30 minutes of the Grand Challenge, because in a real scenario the probability of finding a missing person alive decreases rapidly with time.
- Mission-B: Reconnaissance and environmental survey of a building – Robots had to inspect a building to evaluate damage (represented by markers) and find a safe path to a machine room where valves were located. This required robots to reconnoitre the area, create a map of the building and the outdoor area surrounding it, and locate there the objects of potential interest (OPIs) in order to provide situational awareness to the team.
- Mission-C: Pipe inspection and stemming a leak – Robots had to localise four pipe sections on land, localize another four matching pipes underwater, look for damage to the land pipes and identify a contaminant leak (represented by a marker), reach the valves in the machine room and underwater, and close the correct valves in a synchronised process.
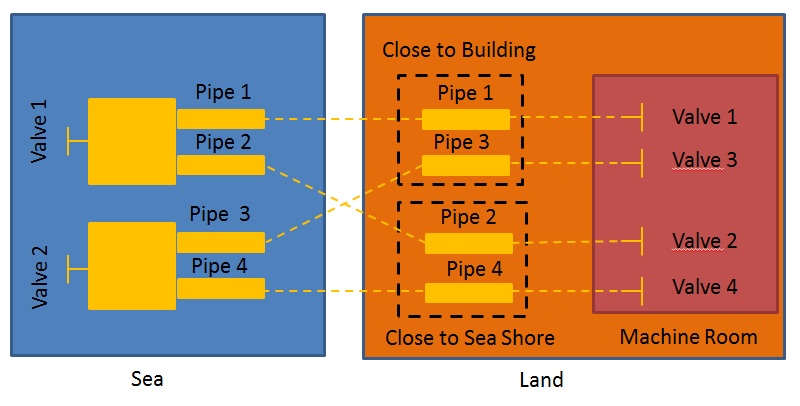
Schematic representation of the distribution of piping sections and valves and their correspondence. Credit: euRathlon

Example of pipe distribution. Source: Google Maps.
The Grand Challenge was successfully met if all the three missions were accomplished within 100 minutes. Strategy was important, as teams were given significant leeway:
- Teams were free to tackle the mission goals in parallel or in sequence, and to choose the order.
- Teams were free to choose which types of robots to deploy, as well as how and when to deploy them.
- A team’s robots could communicate directly, or via their operators at the control station.
Taking place over two days, Grand Challenge was designed to encourage and reward cooperation between ground, marine and aerial robots, while allowing maximum flexibility in participation and innovation. Half of the teams were multi-domain partnerships and the other half full multi-domain teams.
Day One participants:
- Cobham (land) + Universitat de Girona (sea) + ISEP/INESC TEC (air)
- ENSTA Bretagne Team 1 (land, sea, air)
- ENSTA Bretagne Team 2 (land, sea, air)
Day Two participants:
- Bebot (land, air) + AUV Team TomKyle (sea)
- B.R.A.I.N Robots (land) + UNIFI (sea, air)
- ICARUS (land, sea, air)
Watch the video recaps:
The Award Ceremony
After the runs were complete, the judges retired to analyse the data provided by the teams throughout the competition and reach a verdict. The awards ceremony took place at the gardens of Giardini Pro Patria, Piombino.
Alan Winfield, euRathlon project coordinator, welcomed everyone and opened the ceremony. Then followed short speeches by Deputy Mayor Stefano Ferrini, and CMRE Deputy Director Andrew Pickup.
Gabriele Ferri, Director of euRathlon 2015, thanked René Garello, representative of the IEEE Oceanic Engineering Society, for their platinum sponsorship with a special focus on marine robotics. He also thanked the silver sponsors Enel, ECmanaged, Evologics, SBG-Systems and Texas Instruments, and Satoshi Tadokoro, IEEE RAS representative, for supporting the competition with the IEEE RAS Technical Committee (TC) on Safety, Security and Rescue Robotics (SSRR) special prizes for autonomy and multi-robot collaboration.

Winner of euRathlon 2015 Grand Challenge: Team Cobham (Land)+Universitat de Girona (Sea) + INESP/INESC TEC (Air). Photo credit: euRathlon
euRathlon 2015 winners
Grand Challenge
- 1st prize: Cobham + Universitat de Girona + ISEP/INESC TEC
- 2nd equal: ICARUS
- 2nd equal: Bebot + AUV Team TomKyle
- 3rd prize: ENSTA Bretagne Team 1
Land + Air sub-challenge
- 1st prize: Cobham + ISEP/INESC TEC
Sea + Land sub-challenge
- 1st prize: Cobham + Universitat de Girona
Best euRathlon SSRR Autonomy Award, given by IEEE RAS TC on Safety, Security and Rescue Robotics
- Winner: ICARUS
- Finalists: ICARUS, Universitat de Girona, ENSTA Bretagne Team 1
Best euRathlon MRS Multi-Robot Coordination Award, given by IEEE RAS TC on Multi-Robot Systems
- Winner: ICARUS
- Finalists: ICARUS, BeBot+AUV Team TomKyle, Universitat de Girona+Cobham
Texas Instruments Special Prizes for Innovation
- Winner (Land): Bebot
- Winner (Sea): Universitat de Girona
- Winner (Air): ICARUS
Marine Trials Prize (Students prize)
- 1st: Universitat de Girona
- 2nd: ENSTA Bretagne Team 1
- 3rd: AUGA
See you all at euRathlon 2017!

Group photo of euRathlon 2015 participants. Photo credit: euRathlon
tags: c-Events, Competition-Challenge, cx-Research-Innovation, euRathlon, euRathlon 2015, field robotics

AUAI is supported by:









