
Robohub.org
euRathlon Competition: A source of real data for robotics research
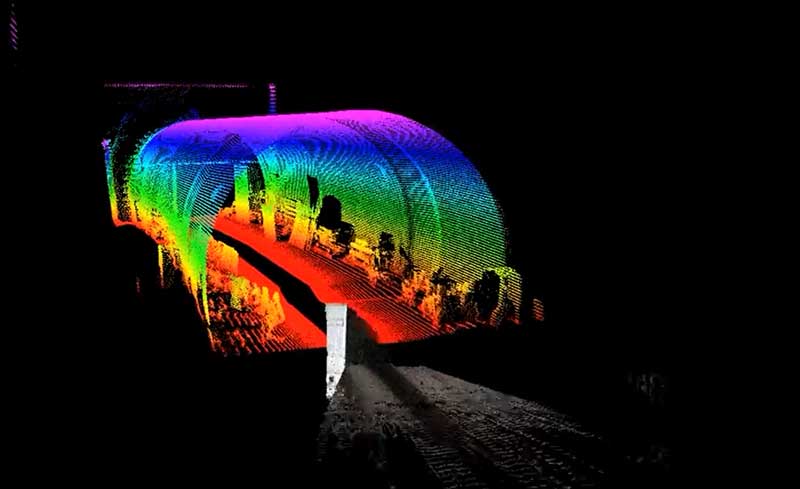
Example of visualization of the euRathlon 2013 Common Shared Data Set (CSDS) for the scenario “Search and rescue in a smoke-filled underground structure”. Technically, it’s a ROS rviz visualization of a recorded sensor rosbag. Photo credit: euRathlon
euRathlon is an EU-funded project that aims to set the standard for research through robotics competitions. It not only provides opportunities to test advanced emergency response robots in very challenging outdoor scenarios, but also recognises that there is an urgent need to develop useful metrics that will advance the field. A series of Common Shared Data Sets of real data gathered before and during the competitions are now available to the robotics community through a cloud tool sponsored by ECmanaged. euRathlon is staging a series of outdoor robotics competitions for land, sea and air robots, inspired by the 2011 Fukushima accident. After successful land and sea competitions in 2013 and 2014 respectively, the project will stage the three-domain euRathlon 2015 Challenge in Piombino, Italy, from 17th-25th of September 2015.
Real data in realistic scenarios
Participating in outdoor competitions is a great opportunity for roboticists to test their vehicles and gather real data in realistic scenarios. The seven euRathlon partners have contributed their expertise in each domain (land, sea and air robotics) to design realistic but also achievable scenarios that are oriented to emergency-services and industry demands. The scenarios also aim to be:
- technically demanding, i.e. pushing the boundaries of the state of the art,
- relevant to the research, industry and user communities, and
- feasible in the context of a competition both in terms of logistics and evaluation.
The importance of Common Shared Data Sets (CSDS)
Teams that are either new to the competition or have limited access to proper hardware and training areas face the problem that they cannot test their system against typical settings as they would appear in the competition. Also the comparison of methods or configurations requires an exactly reproducible data stream from all sensor inputs. A classical approach to coping with this situation is to provide standardized Common Shared Data Sets (CSDS). Many fields in science and engineering employ standardized CSDS to evaluate similar research, approaches, or techniques and to provide the means for their comparison. Common Shared Data Sets are a good base from which to accelerate the progress of the state-of-the-art in research.
We believe that sharing data reinforces open scientific research, promotes new research and encourages a diversity of analysis and opinions. This is why one of our goals is to provide a framework for the community to discuss and work towards the development of metrics, scenarios and other matters of relevance. The metrics and the euRathlon 2015 challenge scenarios draft are open for discussion in the web-based euRathlon forum.
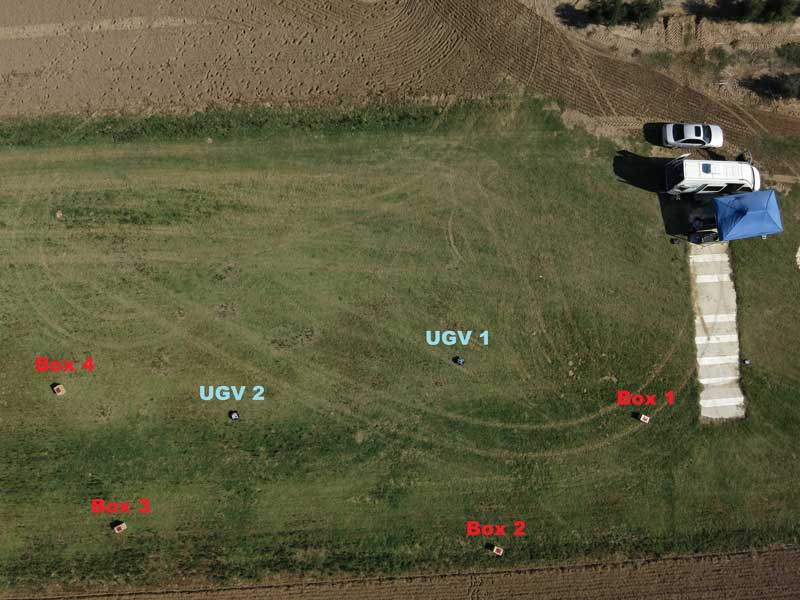
euRathlon 2015 Common Shared Data Set (CSDS) aerial outdoor task. Image acquired by the UAV at the maximum resolution during the high altitude flight. Photo credits: CATEC
euRathlon CSDS are available to the robotics community
The repository of Common Shared Data Sets produced before and during the euRathlon competitions is a valuable pool for testing, benchmarking and comparison. ECmanaged, a Spanish-based company, sponsors euRathlon with a cloud storage tool that allows the open dissemination of the data sets and other online materials to the robotics community and public in general.
In the euRathlon 2013 land competition, we have previously made available recorded real data sets of the scenarios from the real trials area; and in the euRathlon 2014 sea competition, teams could test one week prior the competition in the real location with the objects used in the competition. The euRathlon 2013 land competition CSDS and the euRathlon 2014 sea competition CSDS generously provided by teams participating in the competitions are now available to the community.
For the euRathlon 2015 competition, we have generated two datasets for the aerial domain: a dataset of indoor tasks and a dataset of outdoor tasks. These data sets have been created from real data collected with real systems in real field experiments. The experiments are designed to be similar to the scenarios that teams will face during the euRathlon 2015. The euRathlon 2015 Challenge CSDS (provided by the organisers) can be used to test and improve robotic systems, and we hope will also help to motivate multi-domain teams to participate in the competition.

Teams could test their AUVs in the real location one week before euRathlon 2014 competition. Photo credit: CMRE
About ECmanaged
ECmanaged is a multi-Cloud and IT management tool that enables users to take full control of their Cloud Platforms and Physical servers at the implementation phase and afterwards. Its design and interface allow users to develop Cloud platforms while avoiding provider-imposed restrictions. ECmanaged combines a monitoring tool with automated management actions such as alerting, auto-scaling and disaster recovery. It uses a novel approach of high-level platform modelling allowing Cloud platforms to be developed avoiding provider imposed restrictions. The deployment of applications is also simplified through the use of predefined templates and images. A key feature is the automated incident resolution with up to 80% of incidents being solved without any human intervention in less than 5 minutes.
tags: c-Events, Competition-Challenge, cx-Military-Defense, euRathlon, euRathlon 2015

AUAI is supported by:









