
Robohub.org
Google presents their actual autonomous car test prototype

Google just unveiled their first ‘real-build’ self-driving prototype vehicle. This is a follow up to the concept presented in May and signifies the progress of this particular Google project.
According to the short Google announcement, the purpose of this new prototype is testing, initially on a closed test track and then later in 2015 on public roads. Even so, very few actual details are known, beyond those we covered in our previous article for the initial mockup.
The differences between the two cars, however, are actually quite interesting. Google emphasizes the presence of headlamps, which are an indication that the vehicle could be road legal, although it’s not clear to what extent. A glimpse of its frame and construction hinted at a properly engineered vehicle that may be possible to fulfill all the necessary requirements for a regulatory approval (crash tests etc). However, a loophole for this highly experimental vehicle is possible; it may, for example, be regarded as an electric golf cart of sorts.
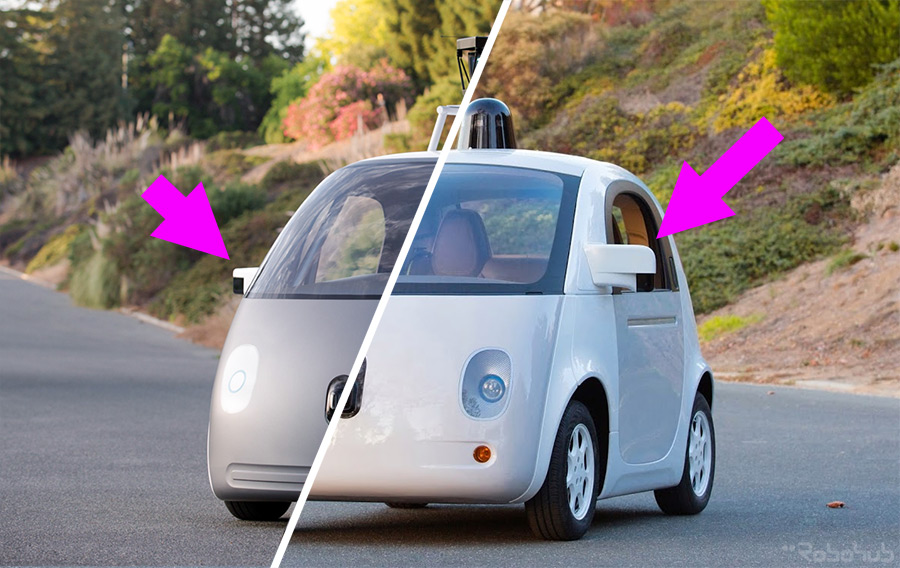
The composite photo above presents the most obvious differences: a better integrated LIDAR, the headlights and other small details. The most important visible difference is the mirrors. On the first mockup, the mirror fairings were small and so could only accommodate the sensors or cameras of the autonomous system. The new one retains the sensors but adds a proper mirror for the driver. It is almost certain that the car will have manual controls (steering wheel, accelerator and brake pedals) so it can be “supervised” on public roads.
2015 will be an interesting year for autonomous driving. Apart from this purpose-built concept, many manufacturers offer ever more advanced systems, and Google is promoting a modular solution of their own.
tags: Automotive, Autonomous Cars, Google, Google car, robohub focus on autonomous driving

AUAI is supported by:









