
Robohub.org
Touchdown! Rosetta’s Philae makes first ever landing on a comet
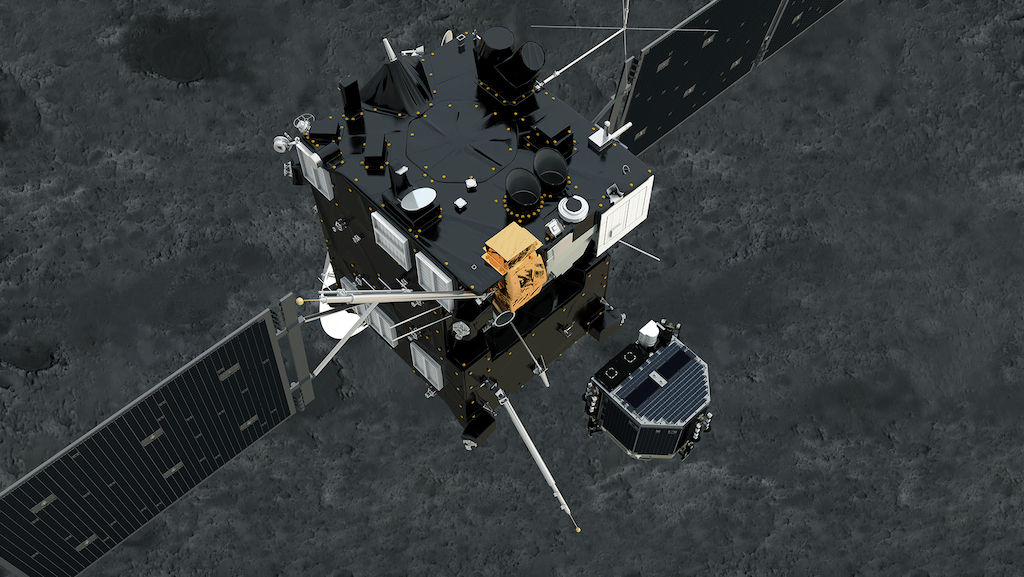
Still image from animation of Philae separating from Rosetta and descending to the surface of comet 67P/Churyumov-Gerasimenko in November 2014 (photo:ESA)
UPDATE: ESA’s Rosetta mission has soft-landed its Philae probe on to the surface of Comet 67P/Churyumov-Gerasimenko. The signal confirming the successful touchdown arrived on Earth at 16:03 GMT (17:03 CET), it’s the first time in history that such an extraordinary feat has been achieved and it’s a great milestone for space exploration and Europe. Read here the full press release from ESA.
LIVE VIDEO FEED | In a few hours a major milestone in space exploration will take place when the Rosetta orbiter deploys a small robotic lander named Philae towards comet 67P/Churyumov–Gerasimenko. This is the first time a spacecraft will reach the surface of a comet and, if successful, will greatly increase our knowledge in this field. Rosetta was launched over 10 years ago and followed an extremely complex trajectory with deep space maneuvers that used the gravity of Earth and Mars to propel it alongside its target and successfully orbit around it. Now the next step, Philae’s landing, will be transmitted live. See the video feed below.
Landing on the comet will be quite tricky: its weak gravity could allow the lander to bounce and escape into deep space. The shape of the surface was unknown until Rosetta came close enough so the landing spot was only recently selected. Philae is equipped with shock absorbers, spring loaded drills and even a harpoon that should be enough to keep it attached upon landing.
You can watch the live transmission from ESA below:
Overview of Philae lander instruments and their function, from DLR
Reaching 67P wasn’t easy. A rare Ariane 5 failure delayed its launch and the mission was repurposed to its current destination. The trajectory was extremely complicated with multiple gravity assist maneuvers, and required the spacecraft to enter hibernation mode, going into standby to save energy. Rosetta is powered by two huge solar panels that demand constant solar exposure instead. Other spacecraft (like Voyager 2) that went this far from the sun, used radioisotope generators.
The video below show the full trajectory of the mission:
An excellent overview of Rosetta/Philae mission is provided by the following Royal aeronautical society podcast. Paolo Ferri (Head of Mission Operations Department, European Space Operations Centre, ESA) introduces the Rosetta mission and its scientific objectives, describing also the spacecraft, its payload and its lander.
Additional resources:
ESA – Rosetta mission
ESA – Rosetta blog
DLR – Rosetta mission
#CometLanding (official hashtag)
@ESA_Rosetta
@Philae2014

Philae separating from Rosetta and descending to the surface of comet 67P/Churyumov-Gerasimenko in November 2014. (Credit:ESA/ATG medialab)
If you liked this article, you may also be interested in:
- One giant leap: Rosetta and the space mining frontier
- Space mining: Robots in the final frontier
- Astronaut on International Space Station successfully controls K10 rover on Earth, supporting use of telerobotics in future deep space missions
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: ESA, Philae, Rosetta, Space

AUAI is supported by:









