
Robohub.org
Smart soft robotics for stroke rehabilitation
The culmination of work by Alistair C. McConnell (lead-researcher) through his PhD and the SOPHIA team, the Soft Orthotic Physiotherapy Hand Interactive Aid (SOPHIA) forms the foundation for our future research into Soft Robotic rehabilitation systems.
Through Alistair’s research, it became apparent that there was a lack of stroke rehabilitation systems for the hand, that could be used in a domestic environment and monitor both physical and neural progress. Alistair conducted a thorough review of the literature to fully explore the state of the art, and apparent lack of this type of rehabilitation system. This review investigated the development of both Exoskeleton and End-Effector based systems to examine how this point was reached and what gaps and issues still occurred.
From this review and discussions with physiotherapists, we developed an idea for a brain machine controlled soft robotic system. The “Soft Orthotic Physiotherapy Hand Interactive Aid” (SOPHIA) needed to provide rehabilitation aid in two forms, passive and active:
• Passive rehabilitation, where the subject performs their exercises, and this is reflected in a 3D representation on a screen, and all the data is stored for analysis.
• Active rehabilitation, where the subject attempts to open their hand and if the full extension is not achieved in a designated time, the system provides the extra force needed.
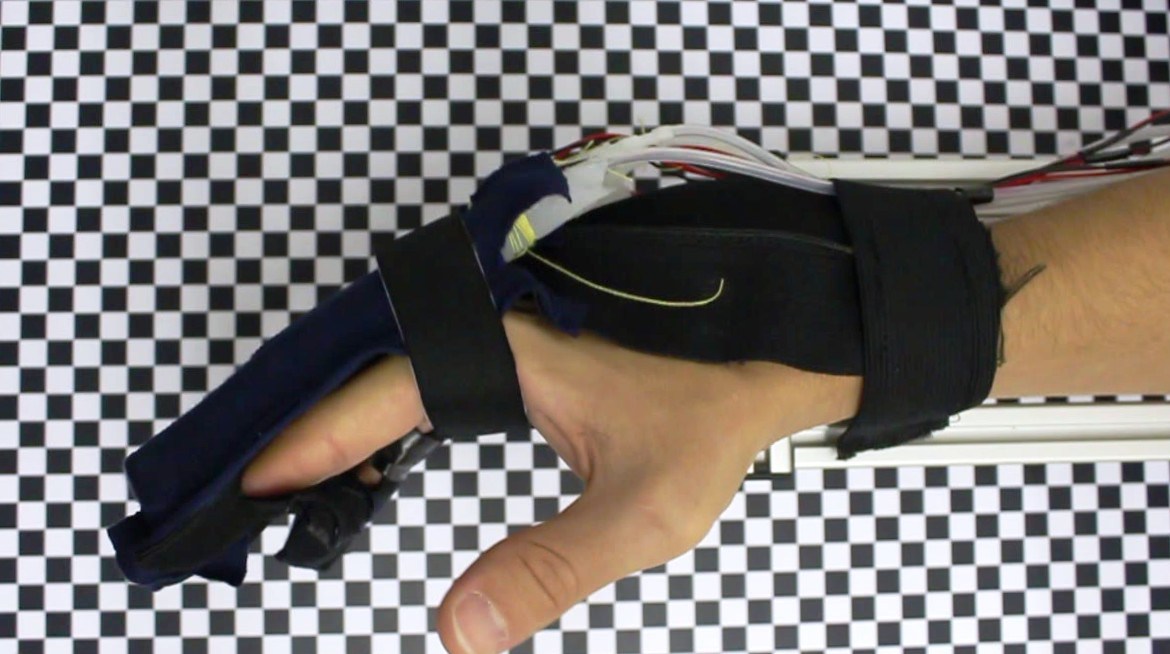
Through a grant from the Newton Fund we developed the SOPHIA system, which consists of a soft robotic exoskeleton with a set of pneunets actuators providing the force for the fingers of a hand to be fully extended, and an electropneumatic control system containing the required diaphragm pumps, valves and sensors in a compact modular unit.
The inclusion of a Brain Machine Interface (BMI) allowed us to use motor imagery techniques, where the electroencephalogram signal from the subject could be used as a trigger for the extension motion of the hand, augmenting the active rehabilitation.
We designed the system to accept input from two different BMI devices, and compared a wired, high-end BMI with a low-cost, wireless BMI. By applying machine-learning approaches we were able to narrow down the differences in these two input systems, and our approach enabled the inexpensive system to perform at the same-level as the high-end system.
You can find further information on the SOPHIA system and the current state of the art in robotic devices and brain-machine interfaces for hand rehabilitation in our recent journal publications.
SOPHIA: Soft Orthotic Physiotherapy Hand Interactive Aid:
https://www.frontiersin.org/articles/10.3389/fmech.2017.00003/full
Robotic devices and brain-machine interfaces for hand rehabilitation post-stroke:
https://www.ncbi.nlm.nih.gov/pubmed/28597018



