
Robohub.org
Who goes where? Simulated robot boats self-organize to defend against attacks
This post is part of our ongoing efforts to make the latest papers in robotics accessible to a general audience.
Individual robots have accomplished many impressive feats. However, certain tasks are much better suited for a team of robots. The use of multiple robots enables the team to divide the task space into regions and commence the task simultaneously in each region of the space (e.g., consider the case of multiple robotic lawn mowers simultaneously cutting grass over a large patch of land). The presence of multiple robots in a team makes it easier to recover from failures. The failure of a highly capable robot doing a task by itself leads to the mission being aborted. However, the failure of a robot in a team often means that the team can continue with the mission.
Because of the above mentioned benefits, there has been significant interest in developing and deploying robot teams. Broadly speaking, there are two different approaches to realize robot teams. The first approach uses robots with very limited intelligence that utilize simple rules to govern their behaviors based on the state of their neighbors and the environment (e.g., consider a robot team inspired by a flock of birds). This type of approach is often called swarming. Despite the apparent simplicity of interaction rules and limited intelligence of individual members, a swarm can exhibit complex and interesting behaviors as a collective. The second approach involves use of intelligent robots that use coordination and cooperation among themselves to tackle challenging missions. In this type of team, each individual robot is capable of doing planning and control for its assigned tasks, actively contribute to the team task assignment, and share situational awareness with other members of the team.
We are interested in deploying robot teams in missions that involve adversaries. In such missions, communication among robots can be limited and intermittent. Hence using a central controller is not feasible. Sensing involves high level of uncertainty due to the possibility of adversaries actively utilizing deception to impede the efforts of the robot team. The adversary may be able devise methods to confuse or misdirect robots with limited reasoning and planning capabilities. Hence we decided to deploy a team of robots that have planning and reasoning capabilities to deal with these situations. Successfully carrying out a challenging mission requires each member of the robot team to do a particular task at a given time. Depending upon the mission context, the role of a robot may change over the time. Each robot should be able to take actions to carry out the task assigned to it. In challenging fast changing environments, this means that individual robots and team need to make good decisions rapidly. Computationally slow techniques for making optimal decision will not work in these types of situations. Instead, the team will need to teach itself how to make fast decisions in a given context.
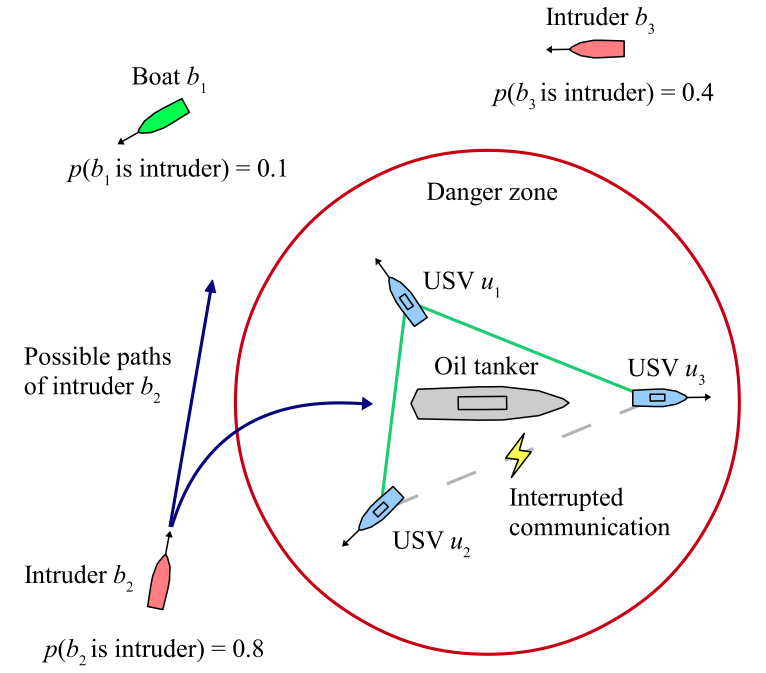
We have developed computational techniques to optimize behaviors of individual robots and how they assign tasks among themselves using a decentralized architecture. Our approach enables optimization of behaviors based on a given mission scenario. Our approach is able to incorporate physics-based models of the adversaries and the environment in the behavior optimization process. The developed approach enables the robot team to utilize model-predictive simulation in the decision making process. This enables the team and robots to make good decisions rapidly. Results show that using our approach a team of robotic boats can effectively defend against an attack on a valuable target under the conditions of limited communication and significant sensing uncertainty.
For more information, you can read the paper Model-predictive asset guarding by team of autonomous surface vehicles in environment with civilian boats (Eric Raboin, Petr Švec, Dana S. Nau, Satyandra K. Gupta, Autonomous Robots – Springer US, August 2014) or ask questions below!



