
Robohub.org
Day Four at euRathlon 2015: Video recap
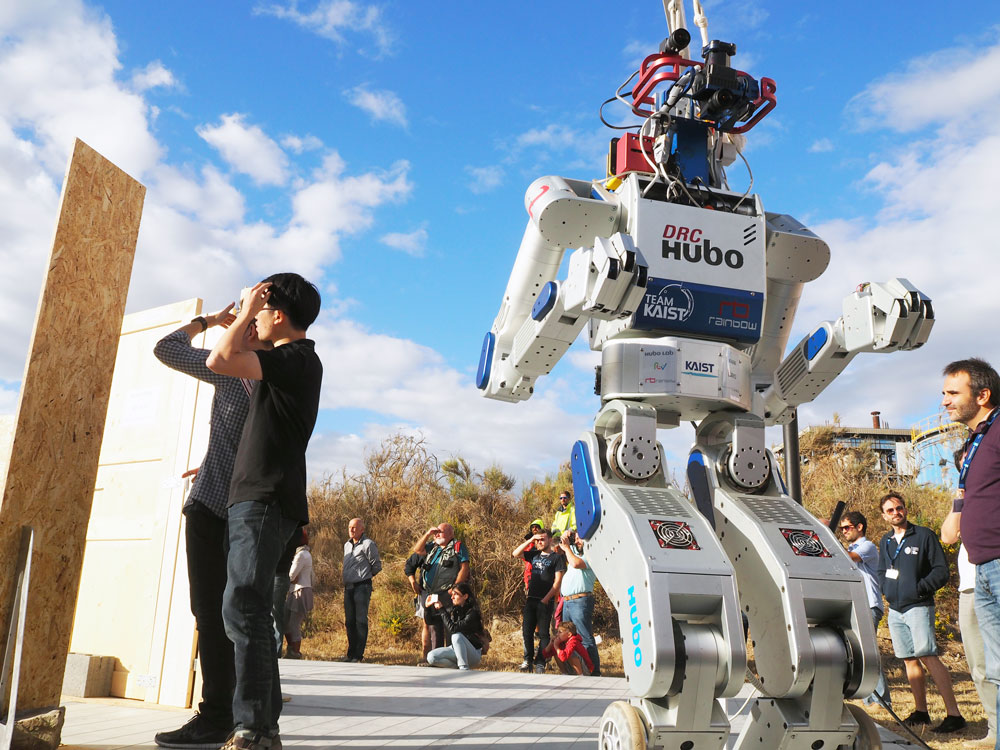
DRC-HUBO robot from Team KAIST, winner of DARPA Robotics Challenge 2015, drops in for a visit on Day Four of eutRathlon 2015. Photo credit: euRathlon
Weather conditions challenged the teams participating on the second day of euRathlon 2015 two-domain sub-challenges. The morning started with the remaining team that had yet to participate in the land and air scenario (L+A). In the afternoon the strong wind made flying aerial robots difficulty, and to some extent, unsafe for spectators. As a result, the judges decided to cancel the sea and air (S+A) scenario scheduled for the afternoon, and allowed the land and sea robots to practise for the next day’s Grand Challenge. Find out the winners of the euRathlon 2015 sub-challenges …
Sub-Challenge (L+A): Survey the building and search for a missing worker
A minimum of one land robot and one aerial robot was required to participate in this scenario.
The robots had to perform a reconnaissance mission of the building and the land surrounding it. A schematic map of the building was given to the teams at the beginning of the sub-challenge. Entrances, corridors, rooms, and the machine room were shown on the map. However, it did not have detailed dimensions and the teams were told that it may or may not be up to date. Teams needed to be aware that an earthquake and tsunami had probably damaged part of the external and internal structure of the building, blocking some paths and entrances.
The team had to look for damage to the building, locate an unobstructed entrance, and at the same time find a safe path to the building and to the machine room for their land robot. Additionally, the robots had to find a missing worker (represented by a mannequin), who was located either inside or outside the building. If the worker was found during the first 30 minutes of the sub-challenge scenario, it improved the team’s chances of rescuing the worker alive.
Teams had 45 minutes to create a map of the interior of the building and its surroundings, and locate objects of potential interest, in this case blocked/unblocked entrances and corridors, damage, and the missing worker.
The multi-domain teams that participated in this second day of land and sea sub-challenges were:
- B.R.A.I.N. Robots (Land) + UNIFI (Sea & Air)
- ENSTA Bretagne Team 1 (Land, Sea & Air)
- ICARUS

One of ICARUS team’s multirotor (ICARUS EU-FP7 project). Photo credit: euRathlon
Caption: One of ICARUS team’s multirotor (ICARUS EU-FP7 project). Photo Credits: euRathlon
Sub-Challenge (S+A): Pipe inspection and search for a worker
A minimum of one marine robot and one aerial robot was required to participate in this scenario. Ground robots were not allowed in this sub-challenge.
In this scenario aerial robots had to inspect and map the beach area surrounding the building, and sea robots had to inspect and map the Enel-harbour area. They had to search for damage and leaks in the four pipe sections on land and the four pipe sections underwater, represented by different markers. The piping sections consisted of cylindrical yellow shapes on land and underwater, and each of the pipes on land was logically connected to one underwater (and vice-versa).
Robots also had to look for a missing worker represented by a mannequin dressed in bright orange. The worker could be located on the land outside the building or at the sea (at the surface near the shore or trapped underwater) in a supine or prone position.
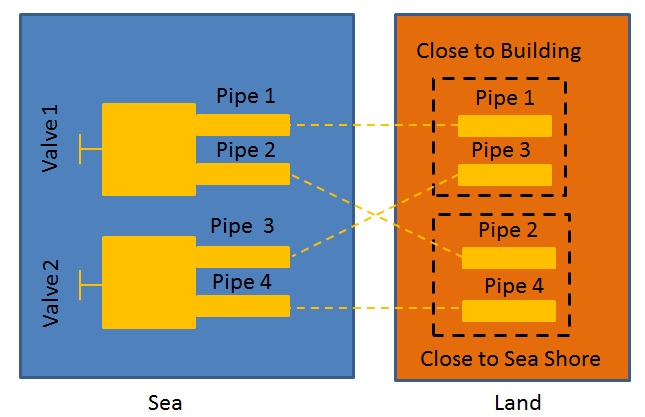
Schematic representation of the piping structures for the Sea & Air Sub-Challenge. Credit: euRathlon
This scenario was cancelled due to poor weather conditions that could compromise safety for the aerial robots.
WALK-MAN and DRC-HUBO humanoid robots exhibition
A large audience of people of different ages came to Tor del Sale, Piombino, to see the exhibition of WALK-MAN and DRC-HUBO robots. These two humanoid robots participated recently in the DARPA Robotics Challenge in Los Angeles (USA). This was the first time they did a demonstration together in Europe. WALK-MAN is the robot developed by the Istituto Italiano di Tecnologia (IIT) and the Research Centre “E. Piaggio” from Pisa as part of an EU-FP7 project with the same name. DRC-HUBO, the winner of the DARPA Robotics Challenge 2015, is developed by the Korea Advanced Institute of Science and Technology (KAIST). The DARPA Robotics Challenge (DRC) is a competition of robot systems and software teams with the aim to develop robots capable of assisting humans in responding to natural and man-made disasters. Team KAIST and Team WALK-MAN showed how their robots walked, close a gate valve and could go up and down steps.
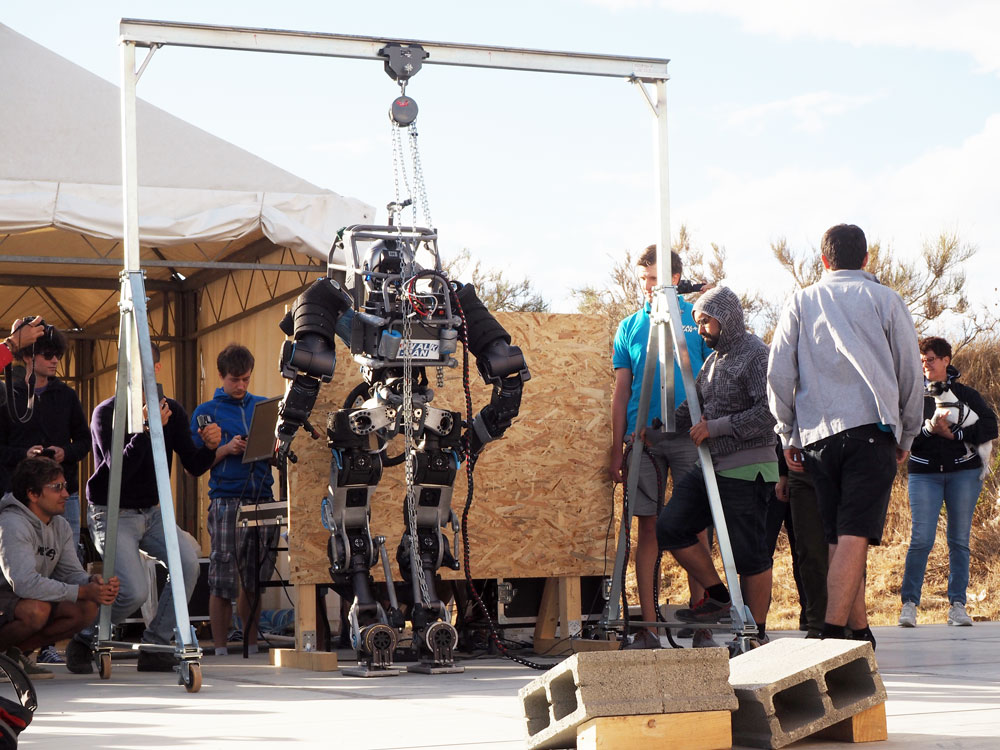
WALK-MAN robot closing a valve during the exhibition. Photo credit: euRathlon
Winners of euRathlon 2015 Two Domain Sub-Challenges
The winners of euRathlon 2015 two-domain sub-challenges were:
- Sub-Challenge (Land +Air) : Survey the building and search for a missing worker:
– 1st Cobham (Land)+ ISEP/INESC (Air)
– 2nd ICARUS (Land, Sea & Air)
- Sub-Challenge (Land & Sea) : Stem the leak:
– 1st Cobham (Land)+ Universitat de Girona (Sea)
– 2nd ICARUS (Land, Sea & Air)
– 3rd AUV Team TomKyle (Sea) + Bebot (Land, Air)
– 4th UNIFI (Air & Sea) + B.R.A.I.M. Robots (Land)
- Sub-Challenge (Sea + Air): Pipe inspection and search for a worker:
Cancelled
Don’t miss tomorrow Day Five recap, the Grand Challenge starts!
Missed coverage of some of the earlier challenges? Find it here.
tags: c-Events, Competition-Challenge, euRathlon, euRathlon 2015, field robotics

AUAI is supported by:









