
Robohub.org
Harvey: A working robot for container crops

In mid-2012, four HV-100 robots from Harvest Automation achieved an elusive milestone in robotics: the robots were purchased by a customer and began everyday farm work. HV-100s, also known as Harvey robots, distribute and collect container-grown plants in greenhouses and on large nursery farms. Since their introduction, more growers have adopted Harveys, and to date, Harvey robots have moved well over three million plants.
The first crop robots to achieve commercial relevance are now entering service in the nursery and greenhouse sector of agriculture. Contrary to popular imagination, expert prediction, and much academic research, the first successful agricultural robots are engaged in activities other than fruit and vegetable picking or row crop maintenance. This article examines the forces that drive the choice of application for commercial robots, describes an early agricultural robot, and suggests areas for further development.
Harvey’s Market
To better understand Harvey, some details of how ornamental plants are grown will be useful. The plants (classified “specialty crops” by the USDA) for sale at your local garden store begin life under controlled conditions. Seeds deposited into multi-well trays germinate and, after a few days, the plug containing the sprout is transplanted into a large soil-filled container. Initially containers sit crowded together, but they soon must be moved apart, or “spaced,” so that the plants can continue to grow without entwining and damaging each other. Although little known outside the industry, spacing is a critical operation in the life of almost every horticultural plant. Spacing is one of several operations Harvey robots perform.

A big problem for growers is that spacing is one of the least desirable jobs on the farm. The task involves bending over, picking up one or more containers in each hand (containers weight up to 22 pounds apiece), walking a few steps, and then bending over again to carefully place them in a specific, predefined pattern. Workers do this task daily throughout the growing season under conditions that range from >100°F heat to cold drizzle. The work is seasonal, injuries are common, and pay is low. Labor supply problems are widespread.
The undesirable nature of spacing work results in high turnover; growers find it difficult to predict how many workers will show up on a given day. Shortages lead to triage. When too few workers are available, growers perform only the most urgent jobs and neglect others. Such compromises can affect the yield and quality of the plants and the profitability of the business.
Labor headaches give the nursery and greenhouse industry a strong incentive to adopt robots. In fact, we have encountered virtually no growers who were unwilling to consider using robots. The industry offers abundant opportunity for robots: in the US alone, the nursery and greenhouse sector produces about $17 billion worth of plants annually. An estimated one to two billion container-grown plants are sold every year, and each plant is typically picked up and moved several times during its life at the farm.
Harvey’s Function
In a typical spacing operation plants loaded on a wagon are pulled to an outdoor growing bed. A multi-tine forklift moves the closely packed plants to the ground en masse (pallets are not used). From here, the plants must be shifted into a regular pattern that gives them room to grow.
When workers perform the spacing task they often use a grid or other guide aligned with a cord stretched along the edge of the bed. The guide, marked with tape or paint spots, helps workers position plants accurately in the desired pattern. The guide is advanced down the bed as workers fill in the pattern.
When robots are used for spacing, a human “robot wrangler” first extends a special robot-detectable tape (called a boundary marker) along one edge of the bed. The wrangler then places at least one container downfield; this establishes the row where the robot will begin placing plants. Next the wrangler dials in certain parameters via the robot’s user interface. Parameters include the spacing pattern (rectangular versus hexagonal), the desired center-to-center distance between plants, and the bed width. Finally, the wrangler points the robot toward the source of plants and presses the start button.
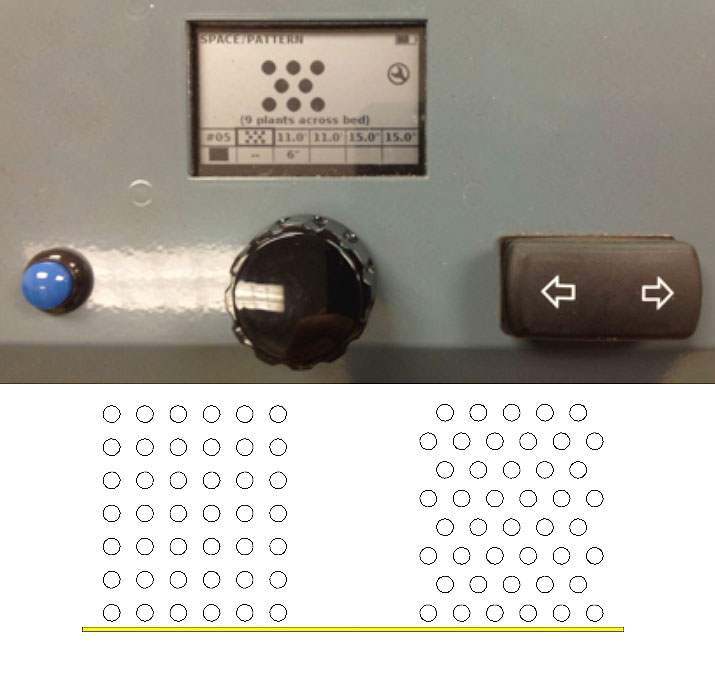
A planar laser range sensor mounted on the robot measures range every half degree throughout a 180°+ field of view. Containers appear as semicircles in the range data. The robot uses this information to locate and approach the nearest accessible container. The robot grasps the container, picks it up, and then turns in the direction of the boundary marker. Special boundary sensors scan the ground as the robot moves forward. When sensors locate the boundary marker, the robot turns to align with and then follow the tape. Soon the pattern of already-spaced plants comes into view. The robot locates the next empty position in the pattern, moves to that spot, and deposits the plant it carries. Afterward, the robot drives back up the bed looking for the next container. The robot proceeds in this way until there are no more plants to move.
Obstacles (i.e. items that are neither plant containers nor other robots) present a challenge when they appear in the work area. Robots attempt to respond appropriately by stopping or avoiding the obstacle. However, current limitations in both sensing and perception leave all robots with less than a human-level appreciation of their situation. For Harvey this means sometimes reaching for the pant leg of a stationary worker as though it were a container. Beyond built-in programming protections, worker safety is ultimately assured by Harvey’s relatively small size and weight. A significant advantage of small robots is that any errors they make or failures they experience become an annoyance rather than a hazard to worker well being.
Harveys can operate in teams. They do not communicate robot-to-robot but rather recognize each other in the range sensor data. When one robot encounters a teammate, the following robot waits for the lead robot to get out of the way before continuing with its task.
The technology built into Harvey robots is designed to be the simplest and least expensive that is able to accomplish the required task. Two items commonly found on outdoor robots that manipulate objects are RTK-GPS for navigation and a six degree-of-freedom arm for object pose control. Harvey uses neither. RTK-GPS was excluded in favor of the boundary system for reasons of cost (centimeter-resolution system are expensive), reliability (GPS signal dropouts degrade performance), and user friendliness (the distinctive boundary tape ensures that workers and robots have the same understanding about where plants will be placed). The simple nature of the manipulation task allows Harvey to perform its job using only an inexpensive, robust, one degree-of-freedom manipulator.

Harvest’s insistence on simplicity, and that every onboard system earns its keep have important consequences. Development time is minimized and the cost of the robot becomes affordable to growers. Also, the robots are straightforward enough that even workers with little education can use them effectively.
Harvey’s Rationale
Predictions of the imminent arrival of agricultural robots have been common for perhaps 50 years or more – see for example the Spokane Daily Chronicle’s Robot Farm Machines that Take Over Farm Work (1955), and the Sarasota Herald-Tribune’s Robot Pickers May be a Part of the Future (1983). Robots that pick fruit or vegetables or that weed fields have often been forecast. But rarely, if ever, has anyone foreseen small robots that would lift and carry potted plants. Why did Harvest choose such an unanticipated application?
Like any product, a robot striving for commercial success must clear hurdles involving market, technology, and price. First, the robot must provide a function or service that customers genuinely want. A robot that fails this test is at best an attractive curiosity. Second, developers must find a way to construct a reliable robot using existing technology. Ignoring this constraint can transform a planned development into an interminable research project. And third, the robot’s price must be competitive with existing solutions to the problem the robot is designed to address. If the price is too high, potential customers will choose existing solutions and shun the robot.
Robots designed to accomplish long-predicted agricultural applications, say picking oranges or tomatoes, are necessarily more complex than Harvey. Such robots await the economical solution of interesting research problems in vision, navigation and manipulation. Harvest’s desire to reach market in a timely manner at a development cost investors were willing to support with a product customers wanted to buy forced us to look beyond commonly predicted applications. (Some would argue that commercial developers should recoil from any type of robot researchers find interesting.)
Measured against the challenges of market, technology, and price, horticultural plant spacing is very appealing. The market is large and potential customers are dissatisfied with the status quo. Fortuitous aspects of the application mean that the technology needed to implement a solution can be relatively simple.

Harvey’s Future
The UN/FAO report How to Feed the World in 2050 (Rome, 2009) estimates that within 37 years world food production must increase by 70% to match demand. The challenge is that farmers will have access to no more water or arable land than is available today. The only option is to increase crop yield by making more efficient use of existing resources.
Every autumn at county fairs across the nation, home gardeners and backyard farmers demonstrate one response to this challenge. By lavishing attention on each plant as it grows, these hobbyists deliver impressive yields of championship produce. Today’s large farm machinery treats every plant the same but small agricultural robots—by caring for each plant individually—have the potential to make every plant a champion.
Yield and quality are maximized when each plant receives exactly what it requires at the moment of need. Large numbers of small, inexpensive robots can make this possible. Robots will constantly monitor soil and plant health. They can add fertilizer and micro-nutrients as needed, enable pest-resistant/soil enhancing poly cultures, harvest individual fruits and vegetables at the ideal maturity level, prune plants strategically, and eliminate yield-sapping soil compaction.
Eventually the difficult problems blocking development of the long-predicted agricultural robots will be solved. But the question is how can we avoid waiting for research breakthroughs and instead make progress today? Harvey offers a hint.
Harvest picked the plant spacing application because it best matched practical market, technology, and cost constraints. That same filter can be applied to direct the development of the next generation of agricultural robots. By identifying market-worthy applications that are a small technical step from existing applications we achieve several goals. Technological risk and time to market are minimized and the cost of the new product becomes predictable. As an example consider two possible targets for future Harveys: harvesting pumpkins (or perhaps watermelons or cantaloupes) and maintaining food crops grown in containers.
Handling melon-like produce appears near-term because, like the containers Harvey handles now, melons are found on the ground, have a graspable cross-section similar to containers, can be distinguished from vegetation, and are not overly delicate.
Robots that minimize the cost of handling plants grown in containers could cause farmers to switch some food crops from in-ground planting to containers. Growing crops in containers has several advantages. Containers allow increased yield by extending the growing season: plants sprouted indoors would move outdoors once the weather warmed. Another advantage is that, rather than have workers stoop to harvest low-growing fruit in the field, robots could bring plants to workers.
The need is great and the technology – if thoughtfully applied – is available. The next several years should prove an exciting and productive time for robots in agriculture.
Additional Information
Harvest Automation website: www.harvestai.com
tags: Environment-Agriculture, Harvest Automation, robohub focus on agricultural robotics, Service Professional Field Robotics Agriculture




