
Robohub.org
ROSCon 2015 recap and videos – part 3
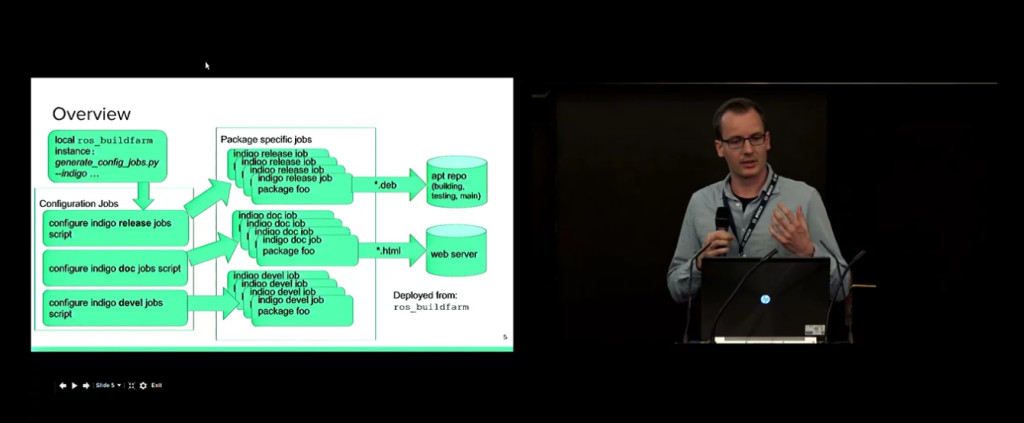
Source: Screenshot from ROSCon 2015, Daniel DiMarco
ROSCon is an annual conference focused on ROS, the Robot Operating System. Every year, hundreds of ROS developers of all skill levels and backgrounds, from industry to academia, come together to teach, learn, and show off their latest projects.
Here is the next set of posts from the OSRF blog, along with videos.
Daniel Di Marco (Bosch): Docker-Based Buildfarm for ROS
Daniel Di Marco is part of Deepfield Robotics, a 20 person agricultural robotics startup within Bosch. Deepfield makes robots that can, among other things, visually locate and then brutally destroy weeds by pounding them into the dirt. In order to deliver software to their customers, Deepfield decided to create its own build farm, and Di Marco’s ROSCon presentation explains why managing a build farm internally is a good idea for a startup.
A build farm is a system that can automatically create Debian packages for you, while running integrated unit tests and generating documentation. OSRF already supports all of ROS with its own build farm, so why would anyone want to set up a build farm for themselves instead? Simple, says Di Marco: it’s something you should do if you actually want to make money with your robots.
If ROS is a part of your thriving robotics business, running a build farm allows you to do several important things. First, since you’re hosting your code on your own servers, you can maintain control over it, protecting your intellectual property and any proprietary components that you may be using. Second, you can use your build farm to distribute your packages directly to your customers, who are (presumably) paying you, and not to just anybody who swings by and wants to snag them. And lastly, you can decide what versions of different packages you want to keep using, rather than being subjected to upgrades that may not work as well.
Di Marco concludes by discussing why Docker is an easy and reliable foundation for a build farm, and how to get it set up. Most of the process has been scripted, thanks to some hard work at OSRF, and Di Marco walks us through an initial deployment to help you get your own build farm up and running.
ROSCon 2015 Hamburg: Day 1 – Daniel Di Marco: Docker-based ROS Build Farm from OSRF on Vimeo.
Ralph Seulin (CNRS, France): ROS for Education and Applied Research: Practical Experiences
The first step in doing something new, useful, and exciting with ROS is — without exception — learning how to use ROS. Ralph Seulin is part of CNRS in France, which, along with universities in Spain and Scotland, collaboratively offer a masters course in robotics and computer vision that includes a focus on ROS. Over four semesters, between 30 and 40 students go through the program. In this talk, Seulin discusses how ROS is taught to these students, as well as what kinds of research they leverage that knowledge into.
Before Seulin’s group could effectively teach ROS to students, they had to learn ROS for themselves. This was a little bit more difficult way back in 2013 than it is now, but they took advantage of the ROS Wiki , read all the books on ROS they could get ahold of, and of course made sure to attend ROSCon. From there, Seulin developed a series of tutorials for his students, starting with simulations and ending up with practical programming in ROS on the TurtleBot 2. Ultimately, students spend 250 hours on a custom robotics project that integrates motion control, navigation and localization, and computer vision tasks.
Seulin also makes use of ROS in application development. One of those applications is in precision vineyard agriculture because, as Seulin explains, “we come from Burgundy.” Using lasers mounted on a tractor to collect and classify 3D data, a prototype robot tractor can be used to analyze vineyard canopies and estimate leaf density. With this information, vineyards can dynamically adjust the application of agricultural chemicals, using just the right amount and only where necessary. Better for plants, better for humans, thanks to ROS.
ROSCon 2015 Hamburg: Day 1 – Ralph Seulin: ROS for education and applied research: practical experiences from OSRF on Vimeo.
ROSCon: Lightening Talk Highlights
The growing popularity of ROSCon means that it’s not always possible to schedule presentations for everyone that wants to give one. In addition, many people have projects that they’d like to share, but don’t need a full twenty minutes to present. That’s why forty minutes of each day at ROSCon are set aside for any attendee to present anything they want; all in a heartlessly rigid three-minutes-or-less format. Here are a few highlights:
Talk 1 (00:05 — 02:15) Víctor Mayoral Vilches, Erle Robotics
Victor is the CTO and co-founder of Erle Robotics. The Erle-Brain 2 is an open source, open hardware controller for robots based on the Raspberry Pi 2. It runs ROS, will support ROS 2, and can be used as the brain for all kinds of different robots, including the Erle Spider, a slightly misnamed hexapod that you can buy for €599.
Talk 3 (06:55 — 10:00): Andreas Bihlmaier, KIT
Andreas works on robot-assisted surgery using ROS at Karlsruhe Institute of Technology. KIT has a futuristic operating room full of robots and sensors designed to help human doctors and nurses through positional tracking, augmented reality, and direct robotic assistance. Andreas is also interested in collaborating with people on ROS Medical, which doesn’t exist yet but has a really cool logo anyway.
Talk 10 (29:20 — 31:30) Jochen Sprickerhof, Universitat Osnabrück
Through the efforts of Jochen Sprickerhof and Leopold Avellaneda, there are now ROS packages available upstream in Debian unstable and Ubuntu Xenial that can be installed from the main Debian and Ubuntu repositories. The original ROS packages have been modified to follow Debian guidelines, which includes splitting packages into multiple pieces, changing names in some cases, installing to /usr according to FHS guidelines, and using soversions on shared libraries.
ROSCon 2015 Hamburg: Day 1 – Lightning Talks from OSRF on Vimeo.
Dirk Thomas, Esteve Fernandez, and William Woodall (OSRF): State of ROS 2
ROS has been an enormously important resource for the robotics community. It turned eight years old at the end of 2015, and is currently on its ninth official release. As ROS adoption has skyrocketed (especially over the past several years), OSRF, together with the community, have identified many specific areas of the operating system that need major overhauls in order to keep pace with maturing user demand. Dirk Thomas, Esteve Fernandez, and William Woodall from OSRF gave a preview at ROSCon 2015 of what to expect in ROS 2, including multi-robot systems, commercial deployments, microprocessor compatibility, real time control, and additional platform support.
The OSRF team shows off many of the exciting new ROS 2 features in this demo-heavy talk, including distributed message passing through DDS (no ROS master required), performance boosts for communications within nodes, quality of service improvements, and ways of bridging ROS 1 and ROS 2 so that you don’t have to make the leap all at once. If you’d like to make the leap all at once anyway, the Alpha 1 release of ROS 2 has been available since last September, and Thomas ends the talk with a brief overview of the roadmap leading up to ROS 2’s Alpha 2 release. As of April 2016, ROS 2 is on release Alpha 5 (“Epoxy”), and you can keep up-to-date on the roadmap and release schedule here.
ROSCon 2015 Hamburg: Day 1 – Dirk Thomas: State of ROS 2 – demos and the technology behind from OSRF on Vimeo.
The rest of the videos from the conference can be found here.
If you enjoyed this post, you may also enjoy reading:
tags: c-Events, ROSCon 2015

AUAI is supported by:









