
Robohub.org
ShanghAI Lectures 2013, Lecture 5 – Soft Robotics and Bioinspiration I
Lecture 5 – Soft Robotics and Bioinspiration I
Hosted by Prof. Cecilia Laschi from the Scuola Superiore S. Anna in Pisa, Italy, this ShanghAI episode puts together contrasting approaches to ‘embodied intelligence’ and ‘embodied cognition’ in her lecture titled “How an octopus can help build a robot”.

Laschi, who among many other things has coordinated the European ‘Octopus’ project, shows a radical approach to embodiment starting from the bottom-up, by taking us through the development of the physical soft structure of a robot octopus. Soft robotics has a lot to say about embodied cognition and morphological computation, and also involves several non-trivial engineering challenges. Can building an artificial octopus really help to advance robotics? Don’t miss Cecilia Laschi’s lecture:
Guest Lecture – “From scene segmentation to task based grasping” by Danica Kragic
 In this talk Prof. Danica Kragic from the KTH in Stockolm, Sweden shows the benefits of embodiment to grasping – from a top-down approach based on computer vision, machine learning and AI. Kragic has led the Grasp european project, and is a leading researcher in the area of AI and robotics. Whatever DARPA tells you, the problem of grasping still isn’t solved. For example we still don’t have a robot that is able to take the dishes from a real world sink and put them into a dishwasher (this would be a killer application, do you agree?) How long will we have to wait?
In this talk Prof. Danica Kragic from the KTH in Stockolm, Sweden shows the benefits of embodiment to grasping – from a top-down approach based on computer vision, machine learning and AI. Kragic has led the Grasp european project, and is a leading researcher in the area of AI and robotics. Whatever DARPA tells you, the problem of grasping still isn’t solved. For example we still don’t have a robot that is able to take the dishes from a real world sink and put them into a dishwasher (this would be a killer application, do you agree?) How long will we have to wait?
A top-down approach to solving ‘real problems’ within the embodied approach to AI and robotics still has several basic research questions to answer. If you have been following the previous lectures you may have noticed that many researchers are approaching the issue of embodied cognition with sometimes very different methods and models, and a synthesis at the level of concrete mathematical models is still missing.
The good news is that we may be on right path. Find out what Kragic has to say on the matter:
Guest Lecture – “Hard Work for Robotics from Soft Actuators” by Bram Vanderborght
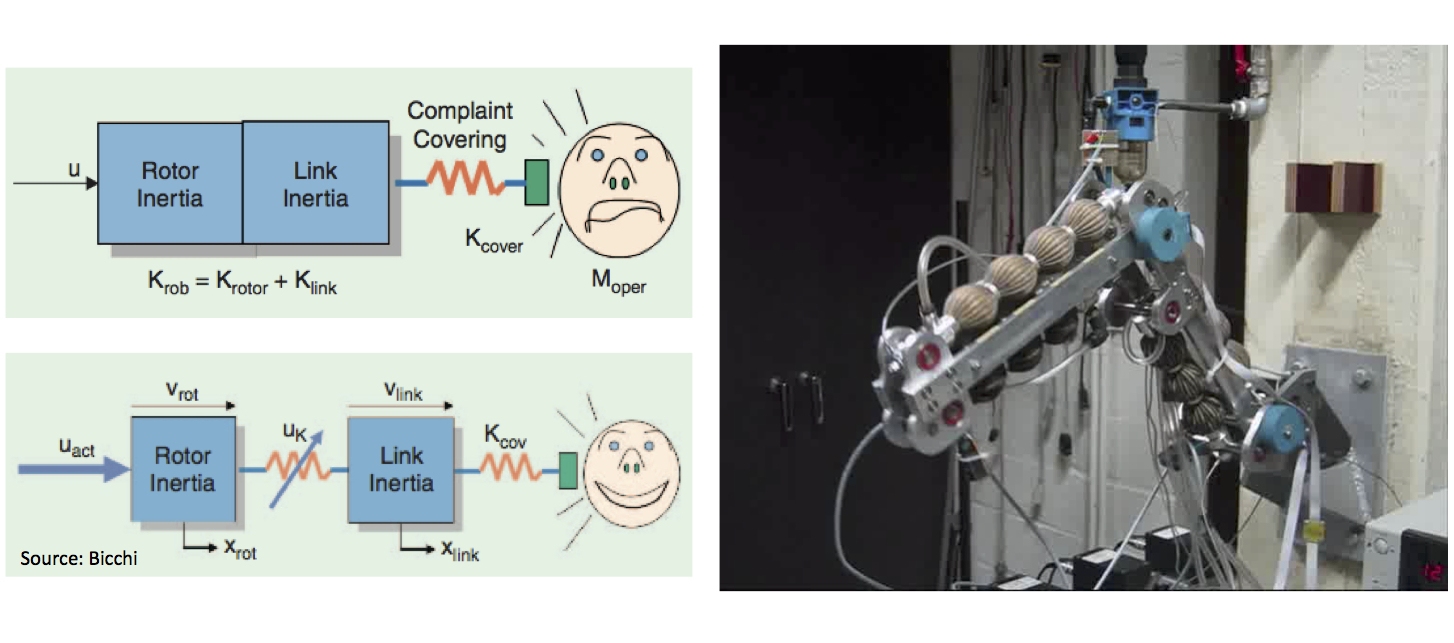 Soft robots need soft actuators, and building soft actuators is not a trivial task. Prof. Bram Vanderborght is with the Vrije University Brussels and does cutting-edge research on soft actuators, in particular in legged locomotion of humanoid robots. Dive into the modeling and engineering challenges and subtle solutions presented by Bram Vanderborght in his talk:
Soft robots need soft actuators, and building soft actuators is not a trivial task. Prof. Bram Vanderborght is with the Vrije University Brussels and does cutting-edge research on soft actuators, in particular in legged locomotion of humanoid robots. Dive into the modeling and engineering challenges and subtle solutions presented by Bram Vanderborght in his talk:
About the ShanghAI Lectures
While in the classical approach “intelligence” was essentially viewed as information processing taking place in the brain, the more recent insight that interaction with the environment is of central importance is gaining acceptance. This has led to the metaphor of embodiment, i.e., that intelligence is always a property of an entire organism — an idea that has far-reaching implications and often leads to surprising insights, but which has not so far been widely exploited in industry practice.
The ShanghAI Lectures project aims to:
- Build a sustainable community of students and researchers in the area of Embodied Intelligence
- Make education and knowledge on cutting-edge scientific topics accessible to everyone
- Explore novel methods of knowledge transfer
- Overcome the complexity of a multi-cultural and interdisciplinary learning context
- Bring global teaching to a new level
These lectures about Natural and Artificial Intelligence have been held via videoconference at the University Carlos III of Madrid in Spain, the University of Zurich in Switzerland, Scuola Superiore Sant’Anna of Pisa, Italy, Humboldt University Berlin in Germany, University of Plymouth and University of Salford in the UK, and 10 other universities around the globe. Students from the participating universities are still working together on the exercises, using Webots by Cyberbotics, and Ludobots by the University of Vermont.
The lectures have also been streamed to allow remote participation to anybody.
The ShanghAI Lectures differ from ‘conventional’ MOOCs as they exploit telecommunication technology to build a global, distributed lecture hall that allows rich interaction rather than simply implementing the good old fashioned TV broadcasting model on a different medium. They also differ from other AI courses as they propose a new paradigm approach to embodied cognition (a.k.a. AI and Robotics). It is a kind of Copernican revolution with respect to GOFAI and its robotics application — and thus a research program for the coming decades.
This year I coordinated the lectures, with help from Prof. Rolf Pfeifer and Dr. Nathan Labhart at the University of Zurich . Rolf Pfeifer and I provided the context (introduction, moderation, and conclusion). As always, there were 2-3 invited guest lectures each week.
tags: Algorithm AI-Cognition, bioinspired, c-Education-DIY, robohub focus on soft robotics, ShanghAI Lectures 2013, soft robotics

AUAI is supported by:









