
Robohub.org
ROS 101: Drive a Grizzly!
So you have had a taste of driving a virtual Husky in our previous tutorial, but now want to try something a little bigger? How about 2000 lbs bigger?
Read on to learn how to drive a (virtual) Grizzly, Clearpath Robotic’s largest and meanest platform. If you are totally new to ROS, be sure to check out our tutorial series starting here and the ROS Cheat Sheet. Here is your next ROS 101 dose.
An updated version of the Learn_ROS disk is available here:
https://s3.amazonaws.com/CPR_PUBLIC/LEARN_ROS/Learn_ROS-disk1.vmdk
https://s3.amazonaws.com/CPR_PUBLIC/LEARN_ROS/Learn_ROS.ovf
Login (username): user
Password: learn
Updating the Virtual Machine
Open a terminal window (Ctrl + Alt + T), and enter the following:
sudo apt-get update sudo apt-get install ros-hydro-grizzly-simulatorsudo apt-get installros-hydro-grizzly-desktopsudo apt-get installros-hydro-grizzly-navigation
Running a virtual Grizzly
Open a terminal window, and enter:
roslaunch grizzly_gazebo grizzly_empty_world.launch
Open another terminal window, and enter:
roslaunch grizzly_viz view_robot.launch
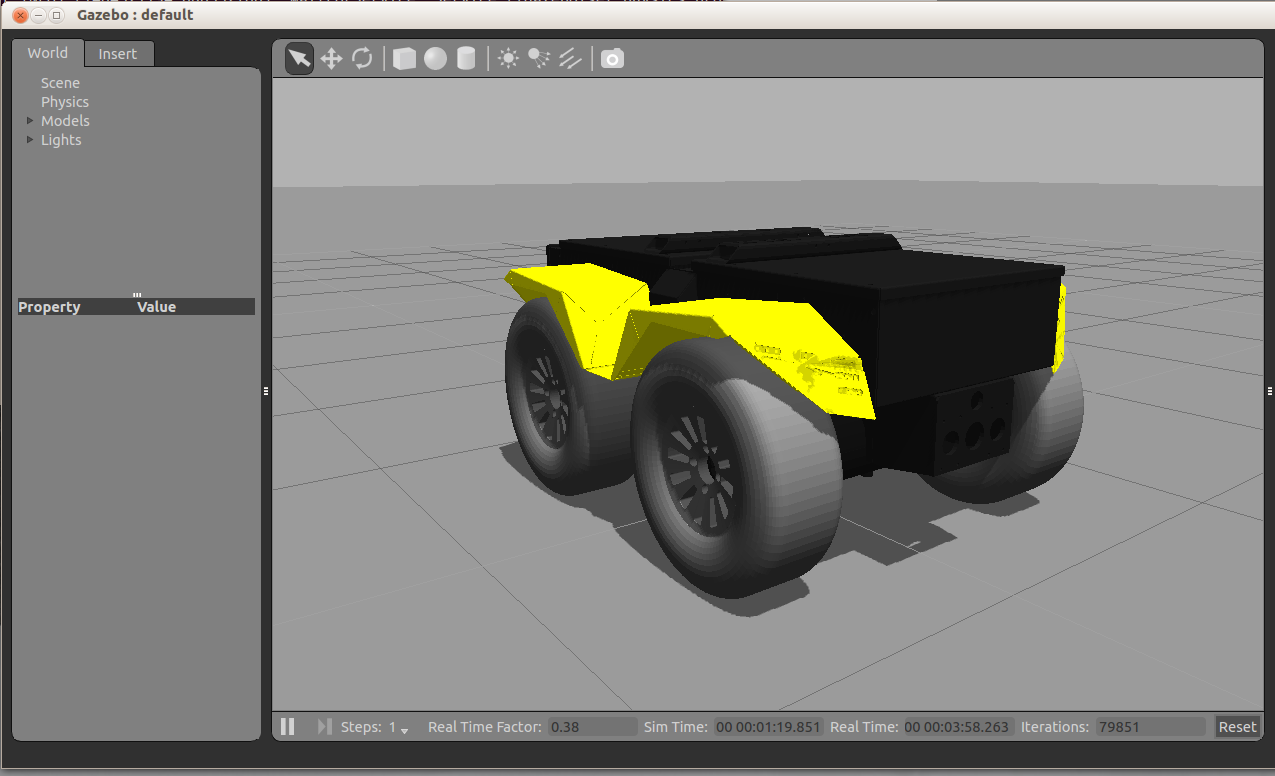
You should be given two windows, both showing a yellow, rugged robot (the Grizzly!). The left one shown is Gazebo. This is where we get a realistic simulation of our robot, including wheel slippage, skidding, and inertia. We can add objects to this simulation, or even entire maps of real places.
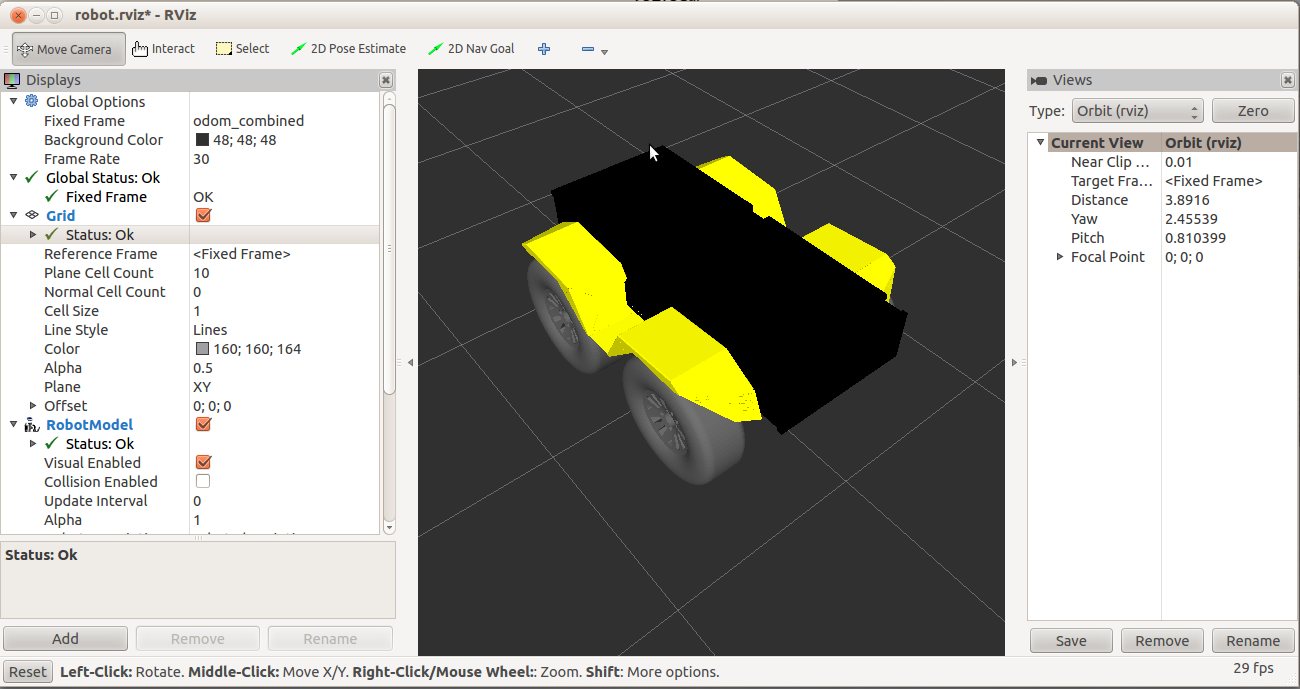
The right window is RViz. This tool allows us to see sensor data from a robot, and give it commands (in a future post). RViz is a more simplified simulation in the interest of speed.
We can now command the robot to go forwards. Open a terminal window, and enter:
rostopic pub /cmd_vel geometry_msgs/Twist -r 100 '[0.5,0,0]' '[0,0,0]'In the above command, we publish to the cmd_vel topic, of topic type geometry_msgs/Twist, at a rate of 100Hz. The data we publish tells the simulated Grizzly to go forwards at 0.5m/s, without any rotation. You should see your Grizzly move forwards. In the gazebo window, you might also notice simulated wheel slip, and skidding. Enjoy and stay tuned for more soon!
See all the ROS101 tutorials here. If you liked this article, you may also be interested in:
- Up and flying with the AR.Drone and ROS: Getting started
- Taking your first steps in robotics with the Thymio II
- Discovering social robotics with the Aisoy1
- Parrot AR.Drone app harnesses crowd power to fast-track vision learning in robotic spacecraft
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: c-Education-DIY, Clearpath Robotics, ROS, ROS101 Tutorial, tutorial
AUAI is supported by:









