
Robohub.org
Building a robot to combat the invasive lionfish (video)
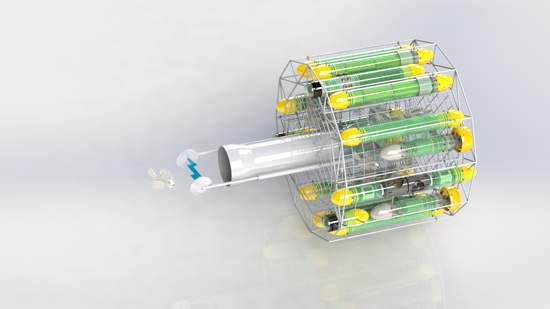
Harvester Prototype Lionfish Hunter side iso photo render — This 3D rendering of a lionfish harvester robot being developed by Robots in Service of the Environment (RISE). The prototype would use a robot arm with two metal electrodes on the end to electrocute invasive lionfish. The stunned fish would then be collected in a central chamber for use as food. Photo by Ed Williams, Robo Nautica (via PBS/YouTube).
Lionfish are invasive to the Atlantic Ocean and their voracious appetites are destroying coral reef ecosystems. RISE (Robots in Service of the Environment) is a new non-profit company looking to restore the balance by building a robot to ‘zap’ these predators.
From their website: “The complete robot is a collection of component systems. These include the ROV platform, capture mechanism, control system, vision system, user interface, and more. Luckily each one of these components exists today in some form but they have never been assembled specifically as a device to hunt lionfish, nor designed to be produced in large numbers at low cost and operated by a non-professional. Nonetheless, the experience learned from these existing components and efforts will allow for the rapid development of the RISE robot and gives confidence that it can be done.”
More information about the project and robot can be found on the PBS website.
tags: c-Research-Innovation

AUAI is supported by:









