
Robohub.org
Biodegradable artificial muscles: going green in the field of soft robotics
Artificial muscles are a progressing technology that could one day enable robots to function like living organisms. Such muscles open up new possibilities for how robots can shape the world around us; from assistive wearable devices that can redefine our physical abilities at old age, to rescue robots that can navigate rubble in search of the missing. But just because artificial muscles can have a strong societal impact during use, doesn’t mean they have to leave a strong environmental impact after use.
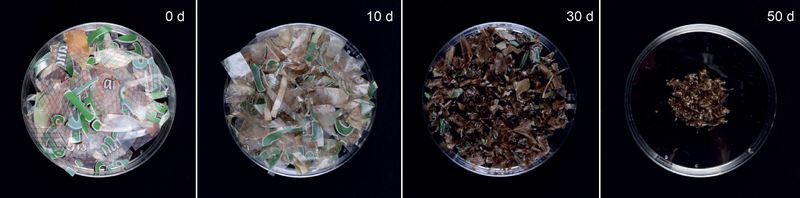
The topic of sustainability in soft robotics has been brought into focus by an international team of researchers from the Max Planck Institute for Intelligent Systems (MPI-IS) in Stuttgart (Germany), the Johannes Kepler University (JKU) in Linz (Austria), and the University of Colorado (CU Boulder), Boulder (USA). The scientists collaborated to design a fully biodegradable, high performance artificial muscle – based on gelatin, oil, and bioplastics. They show the potential of this biodegradable technology by using it to animate a robotic gripper, which could be especially useful in single-use deployments such as for waste collection (watch the Youtube video). At the end of life, these artificial muscles can be disposed of in municipal compost bins; under monitored conditions, they fully biodegrade within six months.
We see an urgent need for sustainable materials in the accelerating field of soft robotics. Biodegradable parts could offer a sustainable solution especially for single-use applications, like for medical operations, search-and-rescue missions, and manipulation of hazardous substances. Instead of accumulating in landfills at the end of product life, the robots of the future could become compost for future plant growth,” says Ellen Rumley, a visiting scientist from CU Boulder working in the Robotic Materials Department at MPI-IS. Rumley is co-first author of the paper “Biodegradable electrohydraulic actuators for sustainable soft robots”, published in Science Advances.
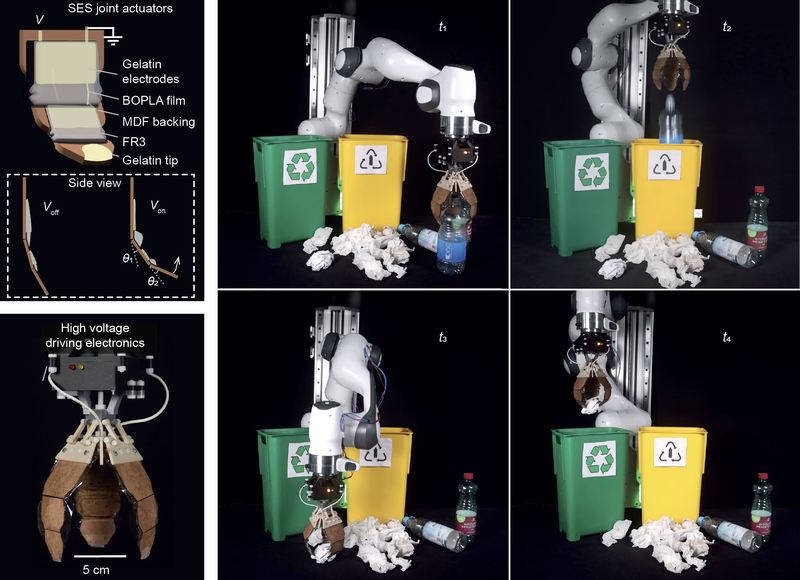
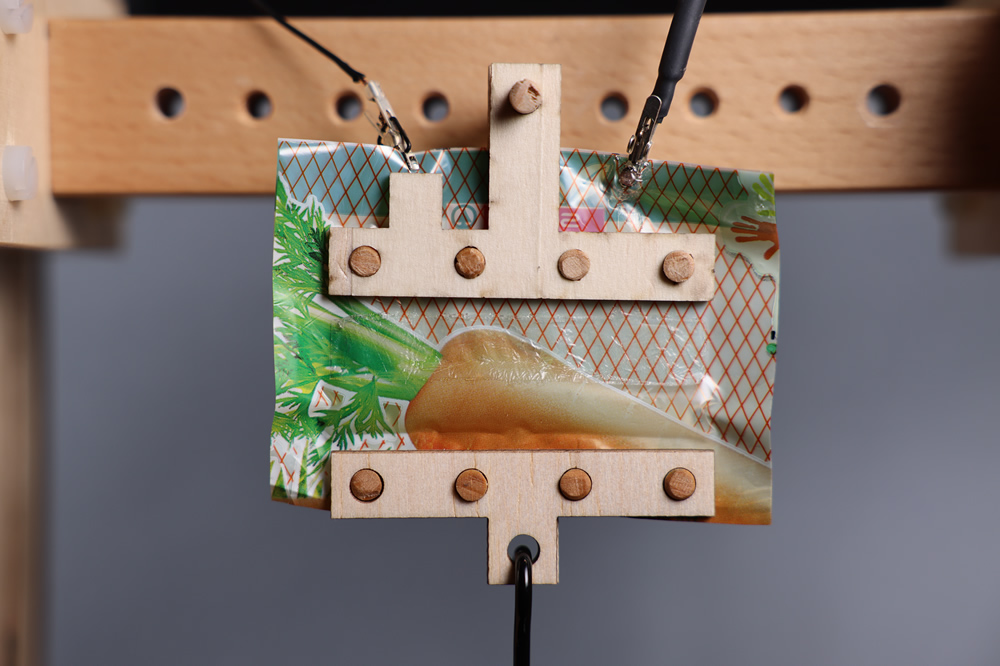
Specifically, the team of researchers built an electrically driven artificial muscle called HASEL. In essence, HASELs are oil-filled plastic pouches that are partially covered by a pair of electrical conductors called electrodes. Applying a high voltage across the electrode pair causes opposing charges to build on them, generating a force between them that pushes oil to an electrode-free region of the pouch. This oil migration causes the pouch to contract, much like a real muscle. The key requirement for HASELs to deform is that the materials making up the plastic pouch and oil are electrical insulators, which can sustain the high electrical stresses generated by the charged electrodes.
One of the challenges for this project was to develop a conductive, soft, and fully biodegradable electrode. Researchers at Johannes Kepler University created a recipe based on a mixture of biopolymer gelatin and salts that can be directly cast onto HASEL actuators. “It was important for us to make electrodes suitable for these high-performance applications, but with readily available components and an accessible fabrication strategy. Since our presented formulation can be easily integrated in various types of electrically driven systems, it serves as a building block for future biodegradable applications,” states David Preninger, co-first author for this project and a scientist at the Soft Matter Physics Division at JKU.

The next step was finding suitable biodegradable plastics. Engineers for this type of materials are mainly concerned with properties like degradation rate or mechanical strength, not with electrical insulation; a requirement for HASELs that operate at a few thousand Volts. Nonetheless, some bioplastics showed good material compatibility with gelatin electrodes and sufficient electrical insulation. HASELs made from one specific material combination were even able to withstand 100,000 actuation cycles at several thousand Volts without signs of electrical failure or loss in performance. These biodegradable artificial muscles are electromechanically competitive with their non-biodegradable counterparts; an exciting result for promoting sustainability in artificial muscle technology.
“By showing the outstanding performance of this new materials system, we are giving an incentive for the robotics community to consider biodegradable materials as a viable material option for building robots”, Ellen Rumley continues. “The fact that we achieved such great results with bio-plastics hopefully also motivates other material scientists to create new materials with optimized electrical performance in mind.”
With green technology becoming ever more present, the team’s research project is an important step towards a paradigm shift in soft robotics. Using biodegradable materials for building artificial muscles is just one step towards paving a future for sustainable robotic technology.

AUAI is supported by:









