
Robohub.org
Could RoboBees help save food supplies? (video)
Source: Wyss Institute
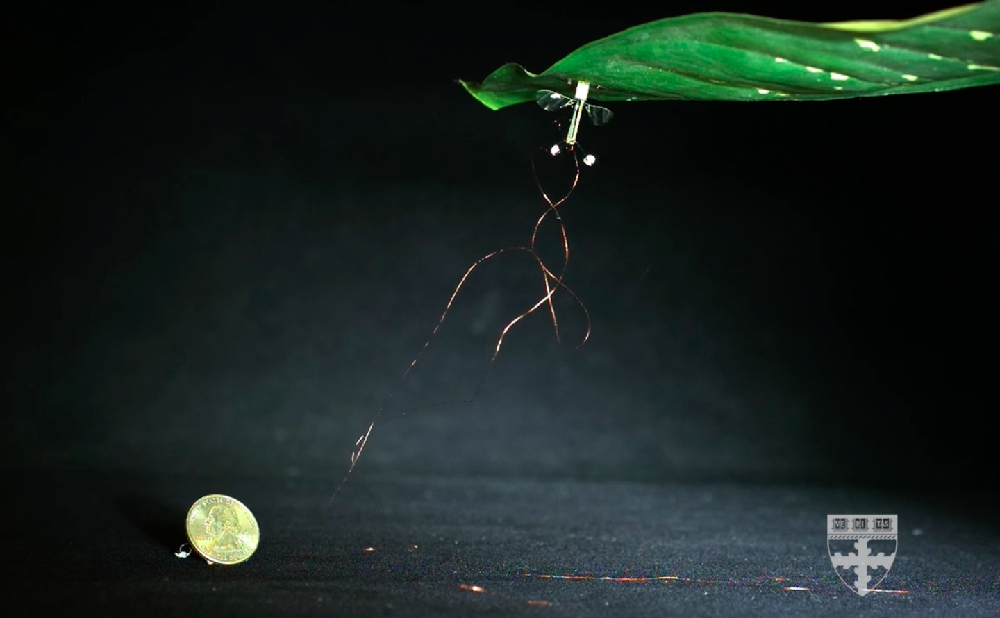
Originally pioneered at the Harvard Microrobotics Lab, in collaboration with Northeastern University, RoboBees are inspired by nature and designed for an important reason: wild pollinators — such as bees and butterflies — are declining at an alarming rate. 75 per cent of the world’s food crops depend at least in part on pollination, putting global food supplies at risk, according to the World Economic Forum.
After a bit more testing, engineers want to move RoboBees out of the lab environment and into the real world, but it could be another five to 10 years before they are able to fly and swarm on their own. It’s also important to note that robotic pollination is not meant to be a replacement or long-term solution for issues like Colony Collapse Disorder, but could potentially provide a stop-gap measure until natural pollinators are restored (however, this robotic technology is at least 20 years away).
As a bonus, these tiny robots could potentially help save disaster victims one day, too.
“The RoboBees can eventually be used for search and rescue, for example in areas where larger robots won’t fit,” says Harvard Microrobotics Laboratory PhD candidate Elizabeth Helbling. “They would also return with the information faster, as you wouldn’t have to wait for one robot to come back, but instead have a whole swarm of them covering a forest or similar.”
Read more about the RoboBees research on Robohub:
- First controlled flight of an insect-sized robot
- Using static electricity, RoboBees cling to surfaces
- RoboBees take to the sky – and now the sea
- Bioinspired robotics #2: Materials, manufacturing & design, with Robert Wood
- Robots Podcast #129: Audio interviews about the controlled flight of insect robots, with Kevin Ma, Pakpong Chirarattananon and Sawyer Fuller
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: Environment-Agriculture, WEF

AUAI is supported by:









