
Robohub.org
DARPA’s legacy: Open source simulation for robotics development and testing
 When the DARPA Robotics Challenge first began to coalesce from an idea to a plan, we knew that we wanted to create a lasting legacy not only for robot hardware capabilities, but also for robotics simulation software. To help with these efforts, DARPA contracted with the Open Source Robotics Foundation (OSRF) in 2012.
When the DARPA Robotics Challenge first began to coalesce from an idea to a plan, we knew that we wanted to create a lasting legacy not only for robot hardware capabilities, but also for robotics simulation software. To help with these efforts, DARPA contracted with the Open Source Robotics Foundation (OSRF) in 2012.
As a first step, we designed the Virtual Robotics Challenge (VRC). The VRC enabled us to invite software developers, who may not otherwise have access to robotics hardware, to participate in the DRC program. DARPA would provide robots to the teams that brought the best software to control them.
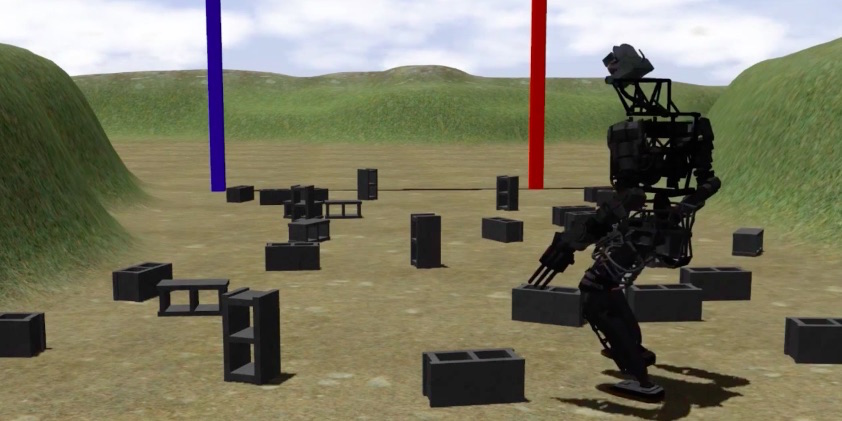
In June 2013, 26 teams competed in the VRC. The competition took place exclusively in the DARPA Robotics Challenge Simulator—also known as Gazebo—an open-source, cloud-based platform. Teams competed in this virtual environment from the perspective of a robot’s onboard sensors within a 3-D virtual environment that displayed the robot sensor data in real time. The top six teams moved on to participate in the DRC Trials using an ATLAS robot. All of these teams are now moving on to compete in the DRC Finals this June.
You can read about the details of OSRF’s role in the Virtual Robotics Challenge or watch a short video here (link is external), but more generally, what I find most impressive about the simulator is how far the technology has come in such a short time, and how quickly it has been adopted throughout the robotics industry. Since the VRC, DARPA has continued to fund OSRF to evolve the simulator to improve simulation accuracy, usability, and a range of features. As of early last year, Gazebo became the first simulator to support four different physics engines (link is external). Each engine provides a unique set of capabilities, and provides users the ability to customize simulation to an unprecedented degree. Many of the DRC finalists continue to use Gazebo as part of their preparation for the upcoming competition.
Additional planned enhancements to Gazebo over the next few months will include Windows support, aerodynamics simulation, improved performance, and more realistic rendering.
OSRF has also expanded the types of virtual environments available. Digital elevation models are fully supported, allowing for simulation of real-world terrain or fictitious landscapes. An in-simulation building editor facilitates the construction of custom multi-story structures. Finally, a new graphical model editor simplifies the process of creating and editing robot and other simulation objects.
Use of Gazebo is now common among robotics professionals working in the areas of service and industrial robots, academics, training and more. It is also being used in DARPA’s HAPTIX program, which is seeking to create an advanced prosthetic hand system that moves and provides sensation like a natural hand.
Even after the DRC is over, the DARPA-funded Gazebo (link is external)
simulation software will continue to be available to future robotics innovators.
tags: ATLAS, c-Military-Defense, cx-Research-Innovation, DARPA, DRC, OSRF

AUAI is supported by:









