
Robohub.org
Day Three at euRathlon 2015: Video recap

Robot Monique (B.R.A.I.N Robots) and the Enel Power Plant in Tor del Sale, Piombino. Photo Credits: Klemen Istenic
The first day of euRathlon 2015 two-domain sub-challenges started with the land and air (L+A) combined scenario, followed in the afternoon by the sea and land (S+L), where robots had to search for missing workers and leaks, inspect the building and close valves on land and underwater. Only ten teams passed to this second round of the competition, creating a total of 6 multi-domain teams — find out the winners of these trials and watch the video recap …
The Sub-Challenges
In euRathlon competition, the sub-challenges are referred to as the combined scenarios. They are two-domain scenarios, each a combination of two trials.
There are a total of three sub-challenges: land and sea (L+S), sea and air (S+A) and land and air (L+A). In the sub-challenges the main goal is cooperation between the two domains. Cooperation and autonomy are rewarded through the scoring schema.
Sub-Challenge (L+A): Survey the building and search for a missing worker
A minimum of one land robot and one aerial robot was required to participate in this scenario.
The robots had to perform a reconnaissance mission of the building and the land surrounding it. A schematic map of the building was given to the teams at the beginning of the sub-Challenge. Entrances, corridors, rooms, and the machine room were shown on the map. However, it did not have detailed dimensions and the teams were told that it may or may not be up to date. Teams needed to be aware that an earthquake and tsunami had probably damaged part of the external and internal structure of the building, blocking some paths and entrances.
The team had to look for damage to the building, locate an unobstructed entrance, and at the same time find a safe path to the building and to the machine room for their land robot. Additionally, the robots had to find a missing worker (represented by a mannequin), who was located either inside or outside the building. If the worker was found during the first 30 minutes of the sub-challenge scenario, it improved the team’s chances of rescuing the worker alive.
Teams had 45 minutes to create a map of the interior of the building and its surroundings, and locate objects of potential interest, in this case blocked/unblocked entrances and corridors, damage, and the missing worker.
Of the total of 6 multi-domain teams, only three teams participated in this first day of land and sea sub-challenges. The teams were:
- AUV Tomkyle (Sea) + Bebot (Land & Air)
- Cobham (Land) + Universitat de Girona (Sea) + ISEP/INESC (Air)
- ENSTA Bretagne Team 2 (Land, Sea & Air)
The rest of teams were scheduled for the next day.
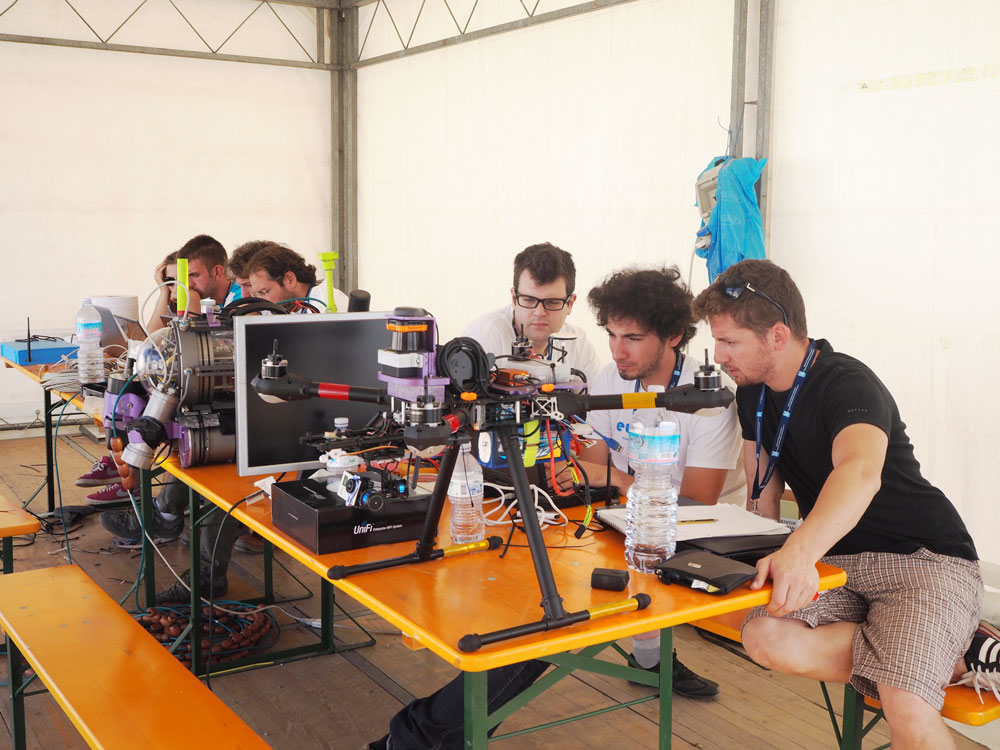
Air Team UNIFI (University of Florence) partners with land team B.R.A.I.N Robots. Photo Credits: euRathlon
Sub-Challenge (L+S): Stem the leak
A minimum of one land robot and one marine robot was required to participate in this scenario. Aerial robots were not allowed in this sub-challenge.
Land and sea robots started from the premise that they had already reached the building and the pipes area underwater, respectively. The main tasks were to find the leaking pipes and close the correct valves underwater and on land to stop the leak. Special care had to be taken, as closing an incorrect valve could cause a reduction of the amount of water provided for cooling the reactor in the scenario, causing the team to incur a penalty.
Land and marine robots had to cooperate to map the area and discover the correct valves. Once the leak on land was found the ground robot had to communicate the number of that pipe to the sea robot, so that it could follow that pipe underwater and close the corresponding valve. In the case of the marine robot, it had to communicate the number of the leaking underwater pipe to the land robot so that it could close the corresponding valve. A schematic of the connections was given to the teams. The robots could not close the valves until the two correct pair were found, as the process of closing them had to be synchronised.
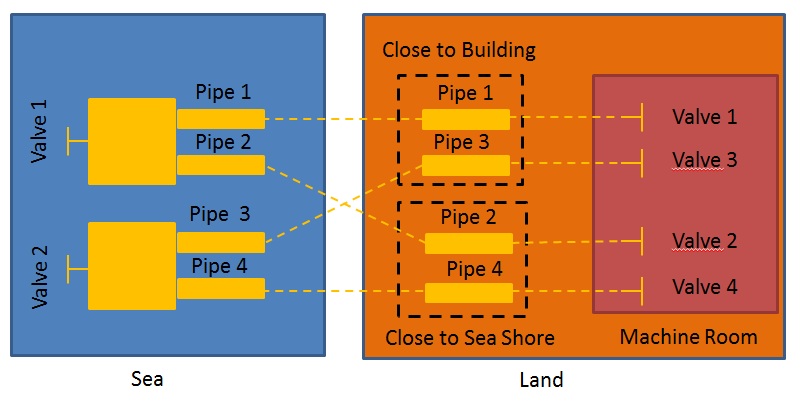
Schematic representation of the distribution of piping sections and valves and their correspondence for Sub-Challenge L+S. Photo credits: euRathlon
In this sub-challenge, it was known that the pipes on land close to the shore were not damaged or leaking, so no inspection of them by the land robots was required.
Only four multi-domain teams decided to participate in this L+S sub-challenge. They were:
- AUV TomKyle (Sea) +Bebot (Land & Air)
- Cobham (Land)+Universitat de Girona (Sea)+ISEP/INESC (Air)
- ICARUS (Land, Sea & Air)
- B.R.A.I.N. Robots (Land )+ UNIFI (Sea & Air)

Team Universitat de Girona (partner in this sub-challenge with Cobham) closing the valve underwater. Photo credits: euRathlon
Robot-era project exhibition
A big crowd of people attended the robotics exhibition of Robot-Era project (Scuola Sant’Anna di Pisa) at Piazza Bovio, in the main square of Piombino city. Robot-Era is an EU-funded project that focuses on the development, implementation and demonstration of feasibility of robots for assisted living. One of it aims is to improve the quality of life and efficiency of care for the elderly people.

: The three assistance living robots of Robot-Era project ready to welcome the public. Photo credits: euRathlon
Winners of euRathlon 2015 Trials (A2, S2, L2).
The winners of the second euRathlon 2015 trials were:
- Land Trial (L2): Mobile manipulation (valve closing):
– 1st Cobham
– shared 2nd ICARUS / Bebot
– 4th SARRUS
– 5th ENSTA Bretagne Team 1
- Sea Trial (S2): Leak localisation and valve closing:
– 1st Universitat de Girona
– 2nd ENSTA Bretagne Team 1
– 3rd AUGA
– shared 4th OUBOT / AUV Team TomKyle
- Air Trial (A2): Aerial reconnaissance inside a building:
– 1st ENSTA Bretagne Team 1
– 2nd ENSTA Bretagne Team 2
Don’t miss tomorrow Day Four recap of the second set of sub-challenges and the exhibition of the DRC-HUBO KAIST and WALK-MAN Humanoid robots!
Missed coverage of some of the earlier challenges? Find it here.
tags: c-Events, Competition-Challenge, euRathlon, euRathlon 2015, field robotics

AUAI is supported by:









