
Robohub.org
Disney’s one-legged untethered hopping robot
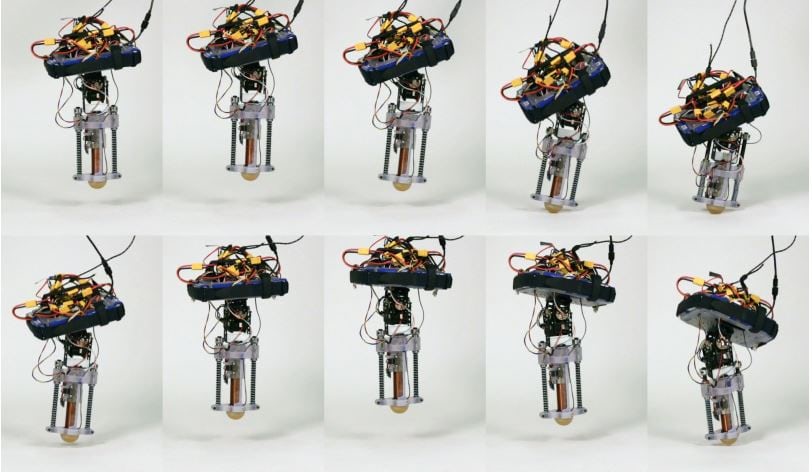
The Disney hopping robot in action (Credit: Disney Research)
Disney Research presents their design and control for an untethered, energetically autonomous single-legged hopping robot. While this isn’t the first hopping robot to be built, it is the first not to rely on a tether or external power source for its hopping.
From their website:
“The thrust-producing mechanism of the robot’s leg is an actuated prismatic joint, called a linear elastic actuator in parallel (LEAP). The LEAP mechanism comprises of a voice-coil actuator in parallel with two compression springs, which gives our robot passive compliance. An actuated gimbal hip joint is realized by two standard servomotors.”
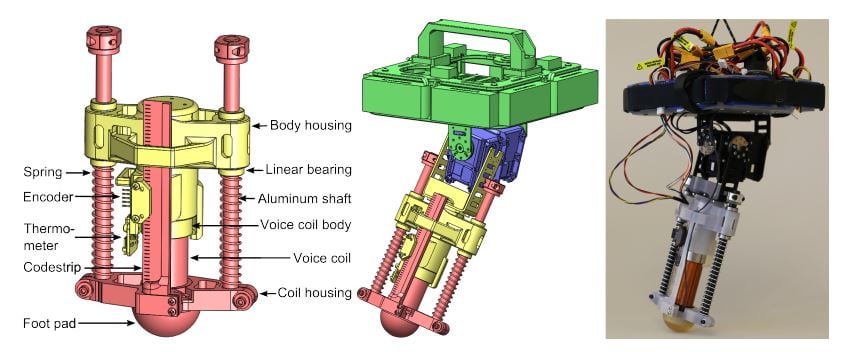
Diagram of the Disney hopping robot (Credit: Disney Research)
The researchers adapted a Raibert’s hopping controller to control the robot and found it could maintain balance in place for up to 7 seconds, or 19 hops, while continuously hopping.
Here are a few more pictures of the hopping robot:
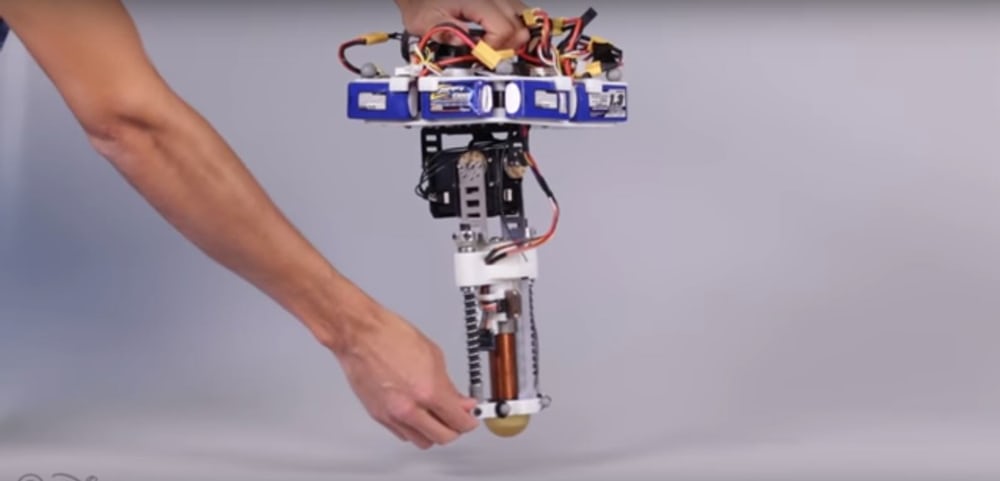
The Disney hopping robot is the first built since 2007 (Credit: Disney Research)
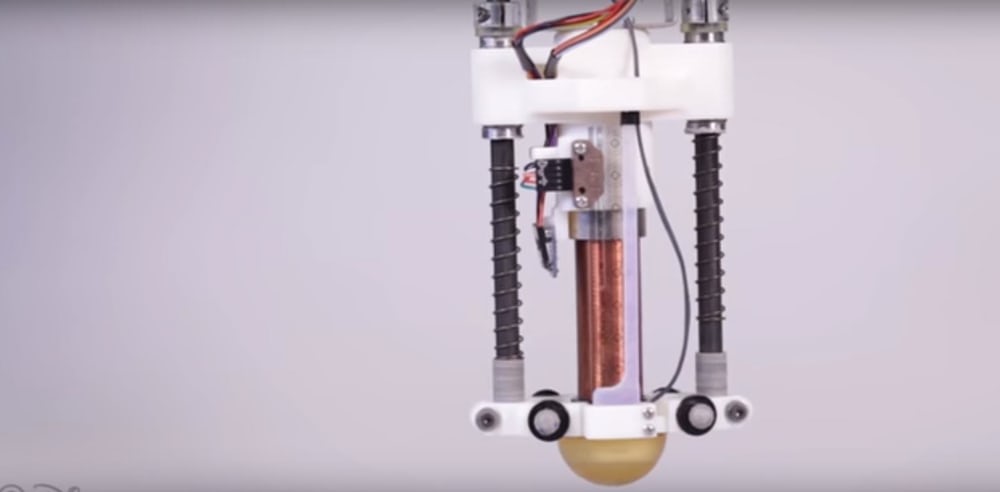
Robot’s leg (Credit: Disney Research)
Robot’s control unit (Credit: Disney Research)
Download the paper here or visit the Disney Research website.
If you liked this article, you may also want to read:
- Robot makers: The future of digital rapid design and fabrication of robots
- Should your robot have a tether?
- Watch humanoid robot Atlas balance on one foot
- Boston Dynamics made a new robot: SpotMini
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: c-Research-Innovation



