
Robohub.org
Drones recognise and follow forest trails in search of lost people
A team of Swiss researchers have taught drones to recognise and follow forest trails. This research unlocks applications of drones for search and rescue in wilderness. The research has been published in IEEE Robotics and Automation Letters and will be presented in May at the IEEE International Conference on Robotics and Automation in Stockholm.
Every year people get lost in the wild worldwide. In Switzerland alone, around 1000 emergency calls per year come from hikers, most of whom are injured or have lost their way. Drones are an efficient complement to human rescuers and can be deployed in large numbers, are inexpensive and prompt, and thus minimise the response time and the risk of injury for those who are lost or work in rescue teams.
A group of Swiss researchers from the Dalle Molle Institute for Artificial Intelligence, the University of Zurich and NCCR Robotics has developed Artificial Intelligence software to teach a small quadrocopter to recognise and follow forest trails. This research is a premiere in the fields of artificial intelligence and robotics and could soon be used in parallel with rescue teams to search for people lost in the wild faster than would be achievable by human rescuers alone.
“While drones flying at high altitudes are already being used commercially (see Amazon or DHL), drones cannot yet fly autonomously in complex environments, such as dense forests. In these environments, any little error may result in a crash, and robots need a powerful brain in order to make sense of the complex world around them.”, says Prof. Davide Scaramuzza from the University of Zurich.
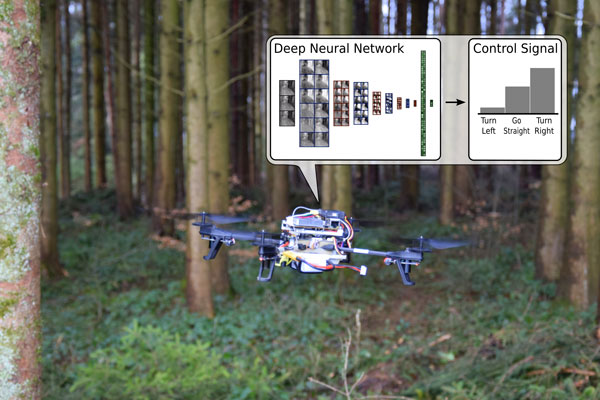
The drone used by the Swiss researchers observes the environment through a pair of small cameras, similar to those in your smartphone. Instead of relying on sophisticated sensors, their drone uses very powerful artificial-intelligence algorithms to interpret the images to recognise man-made trails. If a trail is visible, the software steers the drone in the corresponding direction.
Interpreting an image taken in a complex environment such as a forest is incredibly difficult for a computer; sometimes even humans struggle to find out where the trail is!”, says Dr. Alessandro Giusti from “Dalle Molle Institute for Artificial Intelligence”.
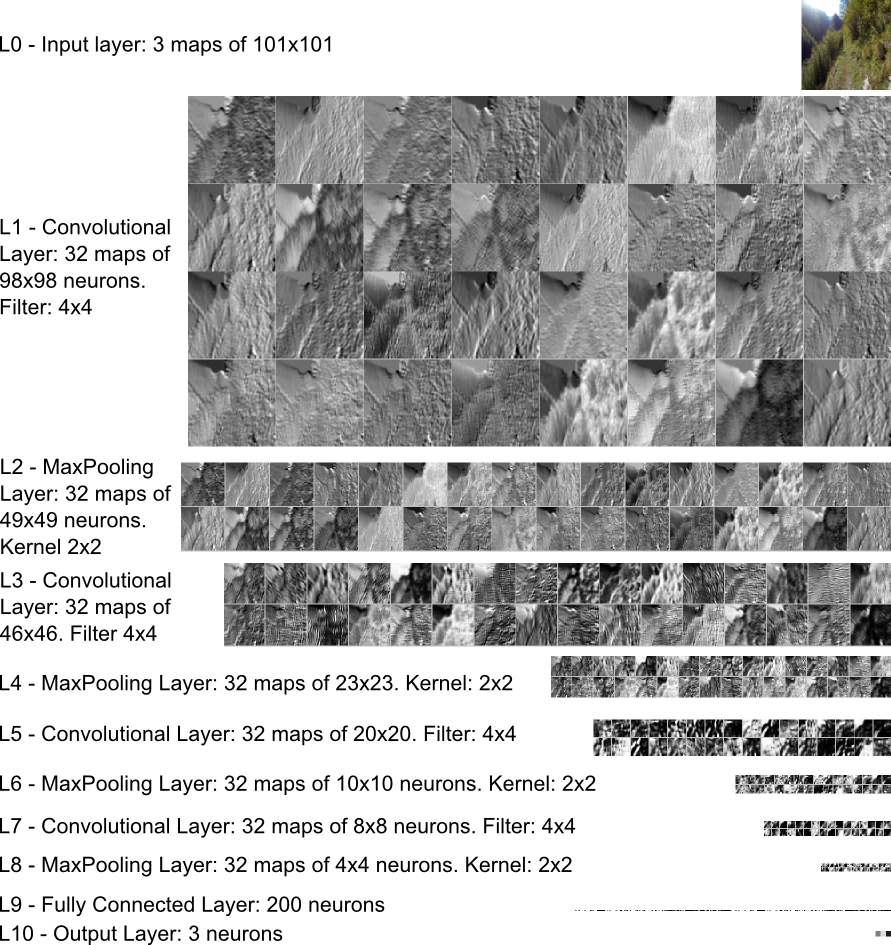
The Swiss team solved the problem using a so-called Deep Neural Network, a computer algorithm that learns to solve complex tasks from a set of “training examples”, much like a brain learns from experience. In order to gather enough data to “train” their algorithms, the team hiked several hours along different trails in the Swiss Alps and took more than 20 thousand images of trails using cameras attached to a helmet. The effort paid off: when tested on a new, previously-unseen trail, the deep neural network was able to find the correct direction in 85% of cases; in comparison, humans faced with the same task guessed correctly 82% of the time.
Dr. Dan Ciresan at the Dalle Molle Institute for Artificial Intelligence comments: “In the last eight years we have developed huge Deep Neural Networks (DNN) to solve difficult problems from the fields of biology, automation and document processing. This is our first attempt at creating a small but performant DNN capable of running on a computer on our drone. I am happy to see that the same networks we have used to analyse biological brains, detect cancerous cells and diagnose retinal disorders can also be used to drive autonomous quadcopters.”
Prof. Juergen Schmidhuber, Scientific Director at the Dalle Molle Institute for Artificial Intelligence says: “Our lab has worked on deep learning in neural networks since the early 1990s when only a few labs were interested in the topic. Today I am happy to find our lab’s methods not only in numerous real-world applications such as speech recognition on your smartphone, but also in lightweight robots such as drones. Robotics will see an explosion of applications of deep neural networks in coming years.”
The research team warns that much work is still needed before a fully autonomous fleet will be able to swarm forests in search of missing people. Prof. Luca Maria Gambardella, director of the “Dalle Molle Institute for Artificial Intelligence” in Lugano, remarks: “Many technological issues must be overcome before the most ambitious applications can become a reality. But small flying robots are incredibly versatile, and the field is advancing at an unseen pace. One day robots will work side by side with human rescuers to make our lives safer: this is a small but important step in that direction!”. Prof. Davide Scaramuzza from the University of Zurich says: “Now that our drones have learned to recognise and follow forest trails, our next step will be teach them to recognise humans!”.
Reference:
A. Giusti, J, Guzzi, D. C. Ciresan, F-L He , J. P. Rodríguez, F. Fontana, M. Faessler, C. Forster, J. Schmidhuber, G. Di Caro, D. Scaramuzza and L. M. Gambardella, “A Machine Learning Approach to Visual Perception of Forest Trails for Mobile Robots“, IEEE Robotics and Automation Letters, DOI 10.1109/LRA.2015.2509024.
tags: c-Aerial, cx-Research-Innovation



