
Robohub.org
ELROB 2016: Europe’s toughest & longest-running field robotics event is turning 10

Source: ELROB
Robotic competitions have sprung up like mushrooms. Beside the obvious ones like EURATHLON, RoboCross, DARPA and MBZIRC, there are hundreds of smaller contests all over the world. Some of them are academic in nature, and some try to address real world scenarios. An even smaller fraction of the latter deal with outdoor/off-road robotics in hazardous environments — these competitions usually involve a Search and Rescue (SAR) or Hazardous Materials Incident Response Operation (HAZOPER) incident. And this is where the lab meets real life! Unfortunately, it’s also where end-users are too often disappointed when their expectations — often buoyed by roboticists’ own overestimations — are not met.
Why does this happen? All too often competition scenarios are designed without deeply consulting with real practitioners like first responders and emergency service workers. This is usually because end-users’ operational requirements are so far beyond today’s robotic capabilities that participating in a competition truly designed around their needs is unrealistic for most competitors. Organizers simply don’t want to spoil all the fun!
Let’s look at an example. euRathlon 2015 was an exciting multi-robot-multi-domain competition that used the Fukushima accident as an emergency-response scenario. In one of the scenario’s the users asked for a building with massive walls, best enforced with metal. This would reflect the limitations to radio communication they face in these environments. The teams were given loads of information beforehand, including the hint that there was a massive building to enter and that the circumstances would be difficult for radio communication. The organisers did their best to keep the information flowing. In the end the vast majority of teams turned up with commercial WiFi/WLAN equipment. That wouldn’t have been a serious problem in the first place if the autonomy had worked, but since that wasn’t the case, all attempts to remotely steer a robot into the building ended just behind the first door. WLAN simply cannot be used behind concrete walls. To cut a long story short: a lot of people felt blue, and this scenario was a disappointment for participants, organizers and end users alike.
What happened? The users asked for something that is almost impossible even with the professional equipment they use themselves. With levity, some of the roboticists promised autonomy while others overestimated their radio communication capabilities. And while you might criticise the researchers for being overly optimistic, or the end-users for setting their expectations too high, the reality is that you will find an analogue picture in more or less every robotics competition: feel free to read the articles by Steve Crowe (managing editor of Robotics Trends) about the “DARPA Robotics Challenge“, for example.
Lessons to be learned? The first real challenge is to get the users, field experts and practitioners to talk to the research and development people (and visa versa, of course). But only after they have found the same (or at least a similar) technical terminology and language. This might be an arduous process, but the individuals who survive the catharsis will be able to come up with something valuable. It is the sole responsibility of the competition organisers to ensure (if not enforce) this convergence and harmonisation.
The roboticists must understand that “the user” is first and most interested in task fulfilment, not in Time and Space complexity. They are interested in tools that make their work easier, safer, and that open new possibilities. Roboticists should test their systems not in artificial settings designed by academics, but in the same training facilities as the professionals use!
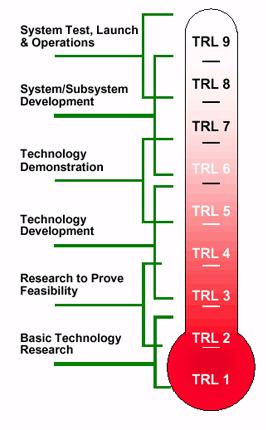
The potential users must understand that R&D people are not manufacturers. It is not the mission of a university to come up with an end-product. The focus of classic R&D is the investigation of scientific or engineering problems. If the users can formulate the problem properly, the roboticists might come up with a capability concept demonstrator that has Technology Readiness Level (TRL) 3-4, at maximum TRL 5.
 Industry and SMEs are key figures in this process. They are the interface between user and R&D; it’s their role to transform the innovative R&D results into a mature product that meets the users’ needs. This is no doubt a tedious task. However, until now European companies have been too fainthearted to take initiative in this process. It might be one of the reasons why there are currently only a few established European robotics companies.
Industry and SMEs are key figures in this process. They are the interface between user and R&D; it’s their role to transform the innovative R&D results into a mature product that meets the users’ needs. This is no doubt a tedious task. However, until now European companies have been too fainthearted to take initiative in this process. It might be one of the reasons why there are currently only a few established European robotics companies.
Since 2006 the European Land Robot Trial (ELROB) successfully combines all these aspects. ELROB offers realistic scenarios that have been developed in close co-operation with users and practitioners to reflect the most up-to-date en-user requirements.
Therefore the event is not organised as a competition but as a trial. First and foremost, this means ELROB is not about being crowned a winner and claiming a huge pot of prize money. Rather, the aim of the trial is to allow all participants to present their systems’ abilities under comparable and fair conditions. Instead of hiding their systems and code behind a shroud of secrecy, participants share experiences and work together synergistically. ELROB actively encourages an exchange of ideas and approaches between academia, industry and end-users, so that community as a whole has the chance to assess current technology as well as to pilot and govern further development. Both the tasks and the scenarios are designed by the users, and the performance of the systems is assessed by field experts. The event offers a fantastic opportunity to mingle with international experts from the field, industry and the R&D sector.
ELROB will mark its 10th anniversary in 2016. Europe’s oldest and toughest robotics event is again setting the pace by addressing the top areas of application:
- Reconnoitring of structures (with a focus on radiological and nuclear measuring and mapping)
- Mule (shuttle between two locations)
- Movements / Convoying (transport with two vehicles)
- Search & Rescue (SAR) / MedEvac (find and drag a dummy casualty)
- Reconnaissance and disposal of bombs and explosive devices (EOD/IED)
Generously supported by the Austrian Armed Forces, this time the event will be held at Tritolwerk — the proving ground used by the emergency forces and CBRNE units for training, and thus the perfect location for ELROB. The composition of the honourable judge team will ensure a good mixture between academia, users and industry.
If you are a roboticist and interested in real world applications, enrol now! SMEs and industry members should consider contributing to our exhibition. Users, practitioners and interested spectators are welcome to register at any time.
Looking forward to meeting you at ELROB 2016!
tags: c-Events, Competition-Challenge, cx-Military-Defense, cx-Research-Innovation, robotics competitions

AUAI is supported by:









