
Robohub.org
#eurathlon2015 tests robotic air/land/sea systems in realistic emergency response scenarios

The location of euRathlon 2015 competition at Torre del Sale, Piombino, Italy. Photo credits: EURATHLON
On March 11, 2011, a tsunami and earthquake struck Fukushima Dai-ichi energy plant causing a major disaster. Since then emergency services have deployed robots to inspect the area and collect data. Some robot surveys were successful while others failed, underlining the pressing need to advance the state-of-the-art in autonomous robots for disaster response. Further research is necessary, and so is testing in realistic environments. Shinji Kawatsuma, from the Japan Atomic Energy Authority (JAEA), urged in his outstanding talk in euRathlon 2013: “Don’t build robots, build robot systems”. And this is what euRathlon 2015 is all about: testing the capabilities of robot systems in realistic mock emergency-response scenarios.
euRathlon is an outdoor robotics competition funded by the European Union with a focus on realistic cooperative search and rescue response scenarios for land, sea and air robots. Inspired by the 2011 Fukushima accident, the euRathlon 2015 Grand Challenge can only be met when these three domains of robotics are working cooperatively. Previous single-domain euRathlon competitions focussed on land (2013), sea (2014). These, alongside team building workshops, and have been building up to the 2015 Grand Challenge, where the overall aim is to advance the state-of-the-art in heterogeneous teams of autonomous vehicles. Multi-disciplinary and multi-organisational teams of students and engineers will survey the scene, collect data, search for missing workers, identify critical hazards, and more, all in a race against the clock. Of the sixteen teams that have qualified for euRathlon 2015, ten will participate in the Grand Challenge (sea, land and air) creating a total of 6 multi-domain teams.
Watch this space for coverage of euRathlon 2015, taking place in Piombino, Italy, Sep. 17-25.The scenarios
The euRathlon 2015 Challenge will be held in the area surrounding the Tor del Sale building, and in the Enel-owned thermal power plant sheltered harbour.
Although competing robots will face mock scenarios, the environmental conditions and difficulties are intended to be as realistic as reasonably possible, and the success criteria will reflect straightforward end-user priorities such as task completion and minimal intervention with the robots.
Three different types of scenarios have been defined:
- The Grand Challenge: a three-domain air, land and sea scenario, which comprises three missions.
- Sub-Challenge: two-domain scenarios; each is a combination of two trials.
- Trial: single-domain scenarios.
The scenarios will begin with the six Trials (2 land, 2 sea and 2 air), move on to the three Sub-Challenges (land + air, sea + air, land + sea), and finish with the Grand Challenge. The euRathlon Grand Challenge main goal is task fulfilment, but autonomy and cooperation between domains are also essential for achieving the mission objectives – to search for missing workers, conduct an environmental survey, and stem a leak – within the allocated time.
Drafts of the scenarios, competition rules and the scoring/benchmarking schema were published in advance for teams to comment. However, detailed descriptions of the scenario setups, for instance the location of blocked doors or missing workers, have not been given to teams because such details would not be known ahead of time in a real life scenario.
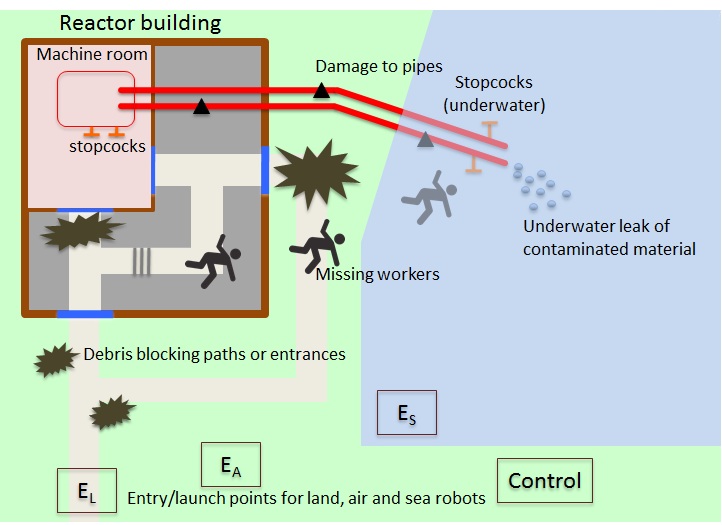
euRathlon 2015 Grand Challenge schematic. Credits: EURATHLON
The teams
As in previous euRathlon events, teams were required to undertake a qualifying process to prove that their vehicle(s) would be able to cope with the scenarios. The teams were asked to write a Scenario Application Paper (SAP) for each of the scenarios they were planning to enter. In the SAPs they describe their robot(s) and explain how they plan to address the technical challenges for each specific scenario. A technical advisory board reviewed the SAPs and checked that the proposed solutions were realistic.
The 16 teams participating in the euRathlon 2015 Challenge are:
- AUGA – Team AUGA (or “water” in Galego) is from ACSM (Advanced Crew and Ship Management), a company that will participate in the sea trials with one of the SPARUS II AUVs that were loaned to less experienced teams by the euRathlon organisation.
- AVORA – The AVORA team is from the University of Las Palmas de Gran Canaria, Spain, which will participate in the sea trials with their robot, Charle.
- AUV Team Tom Kyle – AUV Team Tom Kyle is from the University of Applied Sciences of Kiel, Germany, which will participate in the sea trials with their robot Robbe 131 and will partner with Bebot team for the Sub-challenges and Grand Challenge.
- Bebot Team – Bebot is a two-domain team from the University of Applied Sciences of Bern, Switzerland. They will participate in the competition with their robots Bebot (land) and Bee (Air), and will partner with AUV Team Tom Kyle to participate in the Grand Challenge.
- B.R.A.I.N. Robots – B.R.A.I.N. Robots e.V. from Esslingen, Germany, participated in euRathlon 2013. In 2015 they will participate in trials and sub-challenges with their robots Monique (land), Alice (land), Caro (sea) and Hannah (sea). They will team up with UNIFI Team for the Grand Challenge.
- Cobham – Team Cobham is from the German-based company Cobham Mission Systems. Cobham was one of the winners of euRathlon 2013 with their robot Telemax. This year they will participate in land trials and will team up with ISEP/INESC TEC and Universitat de Girona for the Sub-Challenges and Grand Challenge.
- ENSTA Bretagne Team 1 – one of the two multi-domain teams from the Institute of ENSTA Bretagne, France, that are going to participate in the trials, such-challenges and Grand Challenge. ENSTA is the only institution that participated in both euRathlon 2013 and 2014. They will participate with the robots SAUC’ISSE, SARDINE, USV, ETAS WHEEL, ETAS TRACK, buggy, and two quadrotors.
- ENSTA Bretagne Team 2 – the second of the two multi-domain teams from the Institute of ENSTA Bretagne, France. Like Team 1, they are going to participate in trials, such-challenges and Grand Challenge. Their robots are CISCREA, EUREKA, TREX, a buggy and two quadrotors.
- ISEP/INESC TEC Aerial Team – The team from ISEP/INESC TEC (Portugal) will participate in the aerial trials with their robot OTUS. They will team up with Universitat de Girona and Cobham for the Sub-Challenges and Grand Challenge.
- ICARUS – This is the team of the ICARUS EU-FP7 Project, with partners from Belgium, Germany, Poland, Portugal and Spain. This multi-domain team will participate in the trials, sub-challenges and the Grand Challenge with their robots ASCAMM-LIFT-V and ASCAMM-LIFT-VI (air), UKL-SUGV and RMA-IMM-tEODor (land), INESC_ROAZ and INESC_MARES (sea).
- Team Nessie – The team from the Ocean Systems Laboratory & Heriot Watt University (UK) will participate in sea trials with their robots NESSIE VII and E.M.I.L.Y.
- OUBOT – The team from Obuda University (Hungary) will participate with one of the SPARUS II UAV loaned by euRathlon consortium in the sea trials.
- Robdos Team Underwater Robotics – Robdos is formed by a group of students from the University Polytechnic of Madrid (UPM) and the Spanish-based company Robdos SRL. They will participate in the sea trials with one of the SPARUS II that euRathlon loaned to them and which they participated in euRathlon 2014.
- SARRUS-Search And Rescue Robot of UPM & SENER – is the team of the Universidad Politecnica de Madrid (UPM), Spain, and the company SENER Ingenieria y Sistemas S.A. They will participate in land trials with their robot Summit XL.
- UNIFI Team – UNIFI is the team of the University of Florence (Italy) that will participate in the sea and land trials with their robots FEELHIPPO (sea), MARTA (sea) and BATIGOL (air). They will team up with B.R.A.I.N Robots for the Sub-Challenges and Grand Challenge.
- Universitat de Girona – The team of the University of Girona is formed by students and researchers of the Underwater Vision & Robotics Research Centre (CIRS). The team develops and operates the robot vehicle SPARUS II AUV that was one of the winners of euRathlon 2014 sea competition. This year they will participate in sea trials and will team up with Cobham and ISEP/INESC TEC for Sub-Challenges and the Grand Challenge.
Which teams will successfully address the Grand Challenge? Don’t miss the updates starting this week.
For pictures and more information about the teams visit: http://www.eurathlon.eu/index.php/compete2/teams2015/
tags: c-Events, cx-Exploration-Mining, cx-Military-Defense, cx-Research-Innovation, euRathlon, euRathlon 2015, Mapping-Surveillance

AUAI is supported by:









