
Robohub.org
European Robotics League posts first major tournament results

Team Tech United Eindhoven testing their robot at ERL Service Robots major tournament. Photo: European Robotics League
The European Robotics League (ERL) is a European-based common framework for robotics competitions in the fields of Industrial Robots (ERL Industrial Robots), Service Robots (ERL Service Robots) and Emergency Robots (ERL Emergency Robots). The ERL builds on the success of the European funded FP7 projects EuRoC, RoCKIn and euRathlon.
International teams participate in local and major tournaments distributed across Europe. The three robotics competitions have been designed to address open societal, scientific and industrial challenges and to thoroughly assess, compare, and evaluate their competing innovative approaches. This new robotics league format was launched under the umbrella of SPARC – the Partnership for Robotics in Europe – at this year´s RoboCup in Leipzig, Germany.
The kick-off event took place in Leipzig, Germany, during the RoboCup 2016 World Championship. Organised by SPARC and hosted by Reinhard Lafrenz (Secretary General of euRobotics), it included members from the robotics community, including: Juha Heikkilä, Head of the European Commission Robotics Unit; Anne Bajart, Programme Officer of the European Commission Robotics Unit; Rainer Bischoff, Vice President euRobotics/KUKA; Bruno Siciliano, Researcher from Università degli Studi di Napoli Federico II; Pedro Lima, Coordinator of ERL Service Robots; Marta Palau Franco, Project Manager of ERL Emergency Robots.

European Robotics League organisers and RoboCup trustees at the ERL kick-off event. Photo: European Robotics League
Background about ERL
The ERL provides a common framework for two indoor robotics competitions, ERL Industry Robots and ERL Service Robots, and one outdoor robotics competition, ERL Emergency Robots. These competitions aim at replicating consistent benchmarking results, more so than stating a winner of a single event. The ERL local and major tournaments are based in Europe and open to international participation. ERL Service and ERL Industrial Robots have a diffused set of benchmarking testbed across Europe, where researchers compete, meet, discuss, learn and improve. Whilst ERL Emergency organises a pre-competition summer school and attendees can prepare themselves for participating in the major tournament.
The three competitions target three clear objectives:
- European societal challenge of aging population
- strengthening of the European robotics industry
- push the state of the art in autonomous systems for emergency response
Finally, the ERL provides a platform for challenging, developing and showcasing robotics technologies and engages not only with the robotics community but also industry and general audiences. This new model for the robotics league will be tested for viability alongside its implementation over the next two years.
ERL Service Robots
ERL Service Robots focuses on service robots for home and healthcare applications. The scenarios are designed around the idea of giving support to an elderly person in mastering his/her daily life at home. Robots have to welcome visitors, map the home, and perform a large variety of other general-purpose service tasks.
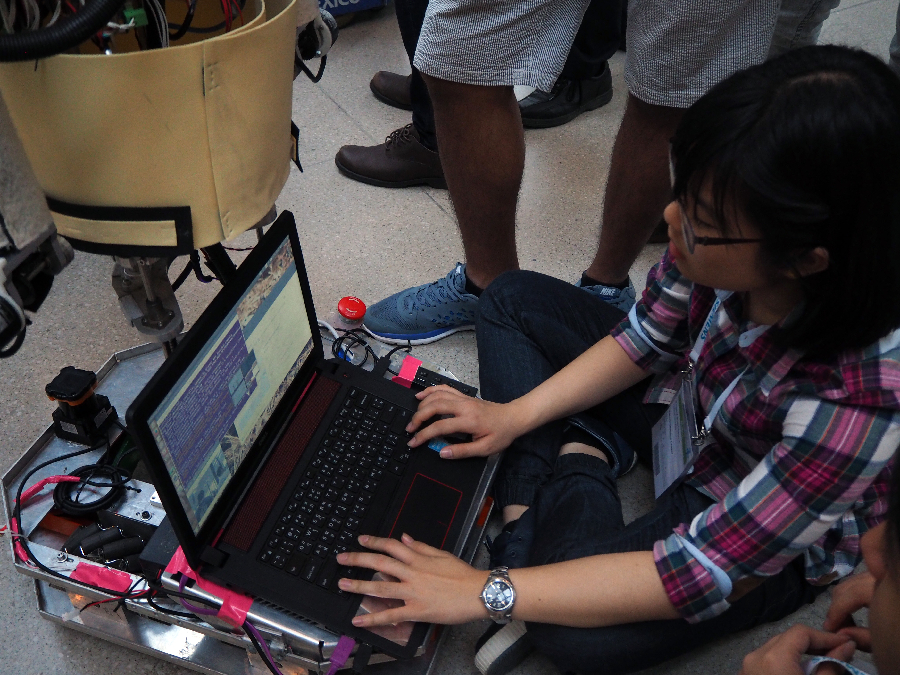
A student setting up her team’s robot. Photo: European Robotics League
The first major tournament of ERL Service Robots was held in conjunction with RoboCup@Home 2016. All the twenty-three teams from thirteen countries that qualified for RoboCup@Home opted to participate in ERL Service. Teams’ performances in two of the RoboCup@Home tasks were shared with ERL Service. The tasks that were assessed using the ERL scoring system were Navigation/Visit My Home and General Purpose Service Robot.
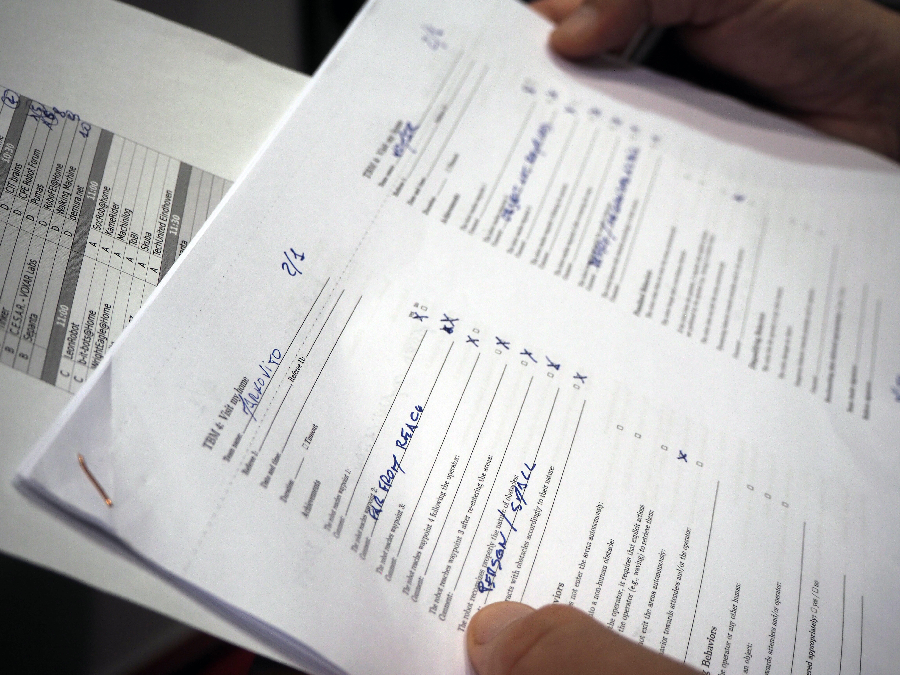
Task benchmarking sheets. Photo: European Robotics League
The ERL scoring system is based on achievements and penalizations, a ‘class’ assigned to each team, determined by their number of achievements. The class number goes from 0 to a maximum number of achievements that may vary from task-to-task.
In this first major tournament, the teams’ classes were:
Task Benchmark: Navigation/VisitMyHome
- ToBI, University of Bielefeld, Germany: Class 6
- Tech United Eindhoven, TU Eindhoven, The Netherlands : Class 3
- CIT brains, CIT, China: Class 2
- eR@sers, Tamagawa University, Japan: Class 2
- Markovito, Mexico: Class 2
- WrightEagle@Home, University of Science and Technology of China, China: Class 2
- b-it-bots@Home, Bonn-Rhein-Sieg University, Germany: Class 1
- KameRider, University of Tokyo, Japan: Class 1
Task Benchmark: General Purpose Service Robot
- ToBI, University of Bielefeld, Germany: Class 3
- homer@UniKoblenz, Univesity of Koblenz, Germany: Class 2
- Tech United Eindhoven, TU Eindhoven, The Netherlands : Class 2
- WrightEagle@Home, University of Science and Technology of China, China: Class 2
- eR@sers, Tamagawa University, Japan: Class 2
- Golem, UNAM, National Autonomous University of Mexico, Mexico: Class 1
- Pumas, UNAM, National Autonomous University of Mexico, Mexico: Class 1
- SocRob@home, Instituto Superior Técnico, University of Lisbon: Class 1
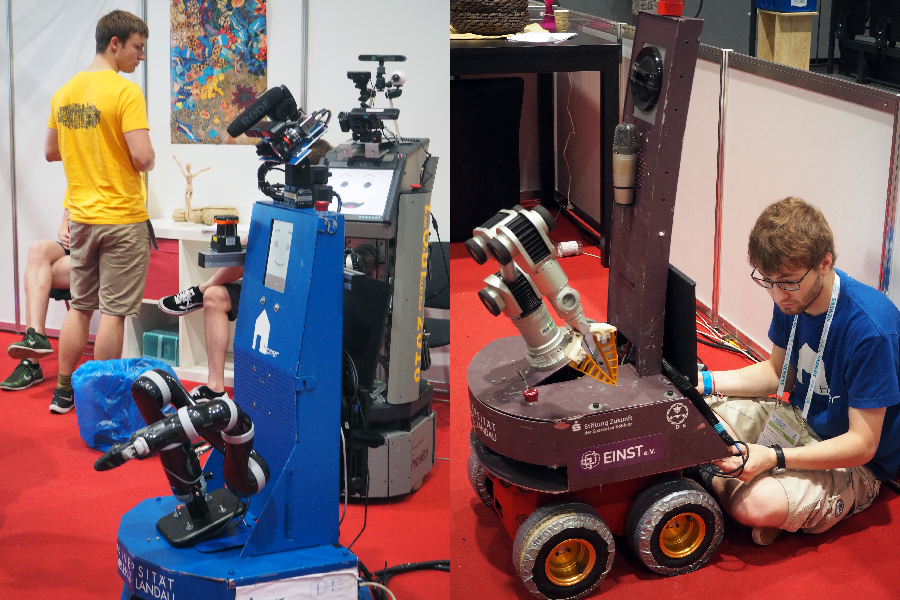
(Left) Team TOBI’s and Team homer@UniKoblenz’s robots. (Right) A member of Team homer@UniKoblenz sets up their robot. Photo: European Robotics League.
The next ERL Service local tournaments will take place in Portugal and Italy. More information on the calls will be published soon.
ERL Industrial Robots
ERL Industrial Robots main purpose is to foster innovation in industrial robotics. The focus is on manipulation, handling, assembly and transport of work pieces. The competition takes place in a scaled-down factory environment and uses desktop-size robots for mobile manipulation. The scenarios include performing a variety of work steps at different locations on a shop floor and automating high-mix, low volume production using a limited number of production equipment.
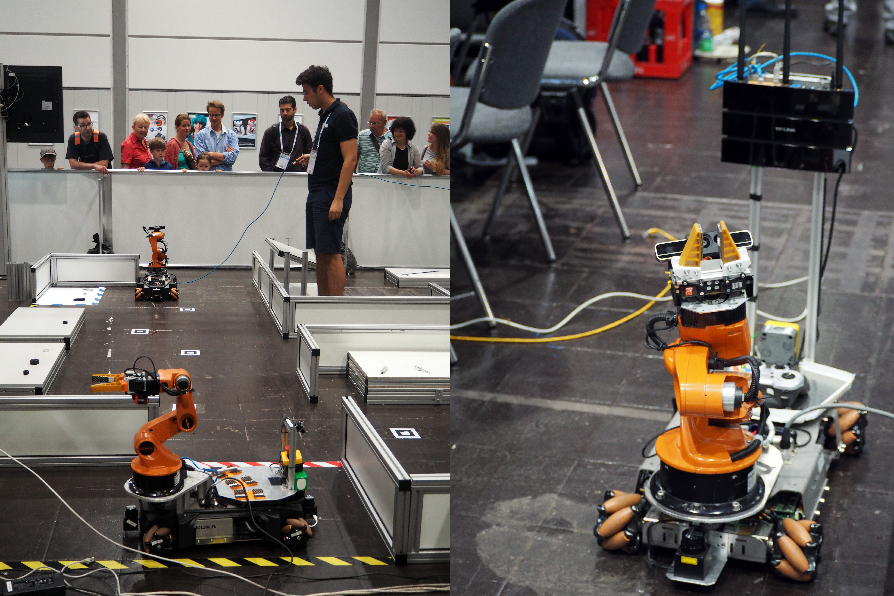
Standard platforms used in RoboCup@Work and ERL Industrial Robots. Photo: European Robotics League
Eight teams of four countries participated in ERL Industrial Robots competition first major tournament in Leipzig. Three RoboCup@Work tasks were assessed using the ERL scoring system, which follows the common model of Penalties and Achievements.
The teams’ classes for the ERL Industrial Robots were:
Task Benchmark: Basic Transportation Task 1
- LUHBots, Leibniz University Hannover, Germany: Class 4
- Robo-Erectus, Singapore Polytechnic, Singapore: Class 4
- AutonOHM, Nuremberg Institute of Technology, Germany: Class 4
Task Benchmark: Basic Transportation Task 2
- smARTLab@Work, University of Liverpool, United Kingdom: Class 3
- AutonOHM, Nuremberg Institute of Technology, Germany: Class 3
- robOTTO, Otto von Guericke University Magdeburg, Germany: Class 3
- Robo-Erectus, Singapore Polytechnic, Singapore: Class 3
- SPQR@Work, Spienza University of Rome, Italy: Class 2
- WF Wolves, Ostfalia University of Applied Sciences, Germany: Class 2
- B-it-bots, Bonn-Rhein-Sieg University of Applied Sciences, Germany: Class 1
- LUHBots, Leibniz University Hannover, Germany: Class 1
Task Benchmark: Basic Transportation Task 3
- B-it-bots, Bonn-Rhein-Sieg University of Applied Sciences, Germany: Class 2
- SPQR@Work, Spienza University of Rome, Italy: Class 1
- AutonOHM, Nuremberg Institute of Technology, Germany: Class 1
- LUHBots, Leibniz University Hannover, Germany: Class 1

Teams preparing their robots for the competition. Photo: European Robotics League
ERL Emergency Robots
ERL Emergency Robots is a civilian, outdoor robotics competition, with a focus on realistic, multi-domain emergency response scenarios. Inspired by the 2011 Fukushima accident, the ERL Emergency Grand Challenge can only be met when land, underwater and flying robots work cooperatively.

Team ICARUS inspecting the building area with their land robots. Photo: Joshua Hayes Davidson
A summer school in collaboration with TRADR EU-FP7 project will take place in Oulu, Finland from 22-26 August 2016. If you would like to attend the outdoor demonstrations as an observer, contact the organisers.
The ERL Emergency Robots major tournament will be held in Piombino, Italy, September 2017. More information on the event will be published autumn 2016.
If you enjoyed this article, you may also want to read:
- European Robotics Week #ERW2015 recap and videos
- Live coverage: Robocup 2016
- Call for euRathlon/TRADR Summer School 2016 on heterogeneity in robotic systems
- Day One at euRathlon 2015: Video recap
- Day Two at euRathlon 2015: Video recap
- Day Three at euRathlon 2015: Video recap
- Day Four at euRathlon 2015: Video recap
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: c-Events, ERL, European Robotics League

AUAI is supported by:









