
Robohub.org
How many axes does my robot need?

Anyone who has been in robotics long enough is eventually tasked with figuring out how many axes they will need for their robot. Most robots have somewhere between three and seven axes, but how do you determine how many you actually need? Here’s a recap of the different types of robots you are likely to encounter, classified by their number of axes (or degrees of freedom).
What is a robot axis?
An axis, in a robotics context, can be interpreted as a degree of freedom (DOF). If a robot has 3 degrees of freedom it can manoeuvre the X-Y-Z axes. However, it cannot tilt or turn. When you increase the number of axes (DOF) on a robot, you can access more space than with a robot that has a lower number of axes. Note that a robot is typically purchased with a given number of axes and it is nearly impossible to add supplementary axes after the fact.
One way to identify the number of DOF of a robot is to simply count its motors. This can be difficult, however, as the motors are often embedded within the robot’s casing. Just be aware that the more axes a robot has, the greater its manoeuvrability. If you need a robot to conduct a complex operation, you will most likely need a robot with greater flexibility.
In the list below we’ve put together handy descriptions of different types of robots, classified by their DOF. Notice there are lots of differences between robot types. Depending on the manufacturer, a robot type may have more, or fewer, axes. So please consider this information as a general guide.
3-axis
3-axis robots — also known as cartesian robots or scara robots — can be compared to a 3-axis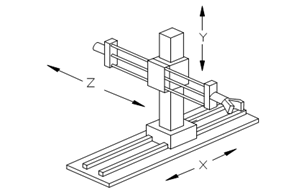 CNC machine or a 3D printer. They are robots that allow tools to travel along their 3 axes, using 3 different motors. These robots can be used for simple pick-and-place operations, where parts will be placed in the same orientation and will be dropped in the exact same spot. For example: if the robot grabs a part in a given orientation, it will need to move in that same orientation because the tool cannot turn.
CNC machine or a 3D printer. They are robots that allow tools to travel along their 3 axes, using 3 different motors. These robots can be used for simple pick-and-place operations, where parts will be placed in the same orientation and will be dropped in the exact same spot. For example: if the robot grabs a part in a given orientation, it will need to move in that same orientation because the tool cannot turn.
A crane is a good example of a 3-axis robot.
4-axis
 If you have a 4-axis robot, you can turn the part around a fourth axis while still traveling along the X-Y-Z axes. Scara, delta and some traditional robots are considered 4-axis robots.
If you have a 4-axis robot, you can turn the part around a fourth axis while still traveling along the X-Y-Z axes. Scara, delta and some traditional robots are considered 4-axis robots.
A 4-axis robot will have four different motors. Typically, the only difference with a cartesian robot is that the fourth axis will be used to rotate the tool. For example: a series of parts is presented on a conveyor and has to be grabbed by the robot. You will have to locate the position of the part (X-Y axes), go down to the height (Z- axis), and finally, tilt the tool to match the orientation of the part.
5-axis
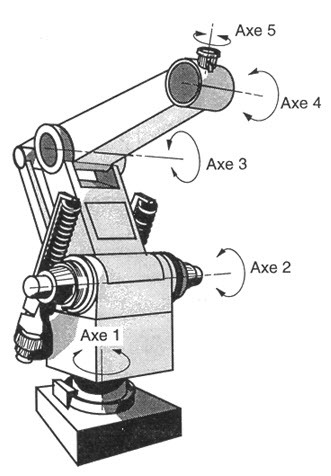 This is where traditional robots begin to show up in our discussion. In fact, a lot of industrial robots have 5 axes. These robots can travel through the three spatial axes (X-Y-Z) and the tool can be turned around on two further axes. In other words, the tool can be turned around axis Z and around axis Y, but cannot be turned around axis X. This means it does not have total freedom of movement and there will still be some positions that cannot be achieved.
This is where traditional robots begin to show up in our discussion. In fact, a lot of industrial robots have 5 axes. These robots can travel through the three spatial axes (X-Y-Z) and the tool can be turned around on two further axes. In other words, the tool can be turned around axis Z and around axis Y, but cannot be turned around axis X. This means it does not have total freedom of movement and there will still be some positions that cannot be achieved.
You can also imagine a 5-axis robot, similar to a 5-axis CNC machine, where your tool can travel through the X-Y-Z axes, the table can spin around the Z-axis (effectively making 4 axes), and finally the table can tilt around another axis (5-axis).
6-axis
 At a minimum, a 6- axis robot is fully free: it can travel through X-Y-Z axes and turn around each axis. The difference between the 5-axis robot shown in the picture is that axes 4 and 5 can turn around another axis. A good example of a 6-axis robot would be the Universal Robot. You can easily count the 6 blue caps (which cover the motors) and easily identify which motor is doing what.
At a minimum, a 6- axis robot is fully free: it can travel through X-Y-Z axes and turn around each axis. The difference between the 5-axis robot shown in the picture is that axes 4 and 5 can turn around another axis. A good example of a 6-axis robot would be the Universal Robot. You can easily count the 6 blue caps (which cover the motors) and easily identify which motor is doing what.
7-axis

We just said that 6-axis robots are free to reach every location available in space, so what is the point of having a 7-axis robot? Well, having that extra axis allows you to arrive at an end effector position with several joint configurations. It is used to avoid singularities and to be able to avoid certain objects by placing the arm in different orientations than what a 6-axis robot could accomplish. A great example of a 7-axis robot would be the Motoman SDA series. 7-axis robots are also called ‘redundant robots’ because they have one extra axis.
What about 12 and 13 axis robots?
This just means that two 6-axis robots are joined together to form a 2-armed robot. It may be that the base of this robot can rotate around itself; this will then add an axis (arriving at 13 axes). But in terms of space, these robots can’t reach any further with their 12 axes because there are only three dimensions in our perception.
If you liked this article, you may also be interested in:
- How to calculate a robot’s forward kinematics in 5 easy steps
- Where to place fuses and how to protect your robot and motors
- Dry vs wet, oil vs grease: Choosing the right lubrication for your robot
- Selecting a camera and lens for your robot
- Things to think about when transporting your robot
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: c-Industrial-Automation, cx-Education-DIY


AUAI is supported by:









