
Robohub.org
Looking at new trends in Distributed Robotics Systems and Society

Figure 1: A distributed robotic system managing the logistics of a warehouse.
It isn’t a secret that distributed robotic systems are starting to revolutionize many applications from targeted material delivery (e.g., Amazon Robotics) to precision farming. Assisted by technological advancements such as cloud computing, novel hardware design, and manufacturing techniques, nowadays distributed robot systems are starting to become an important part of industrial activities including warehouse logistics or autonomous transportation.
However, as many engineers and scientists in this field know, several of the heterogeneous characteristics of these systems that make them ideal for certain future applications — robot autonomy, decentralized control, collective emergent behavior, collective learning, knowledge sharing, etc. — hinder the evolution of the technology from academic institutions to the public sphere. For instance, controlling the motion and behavior of large teams of robots still presents unique challenges for human operators, who cannot yet effectively convey their high-level intentions in application. Moreover, robots collaborating through the cloud might find difficulties applying shared knowledge due to physical hardware differences. Solutions to these issues might be necessary steps towards mainstream adoption.
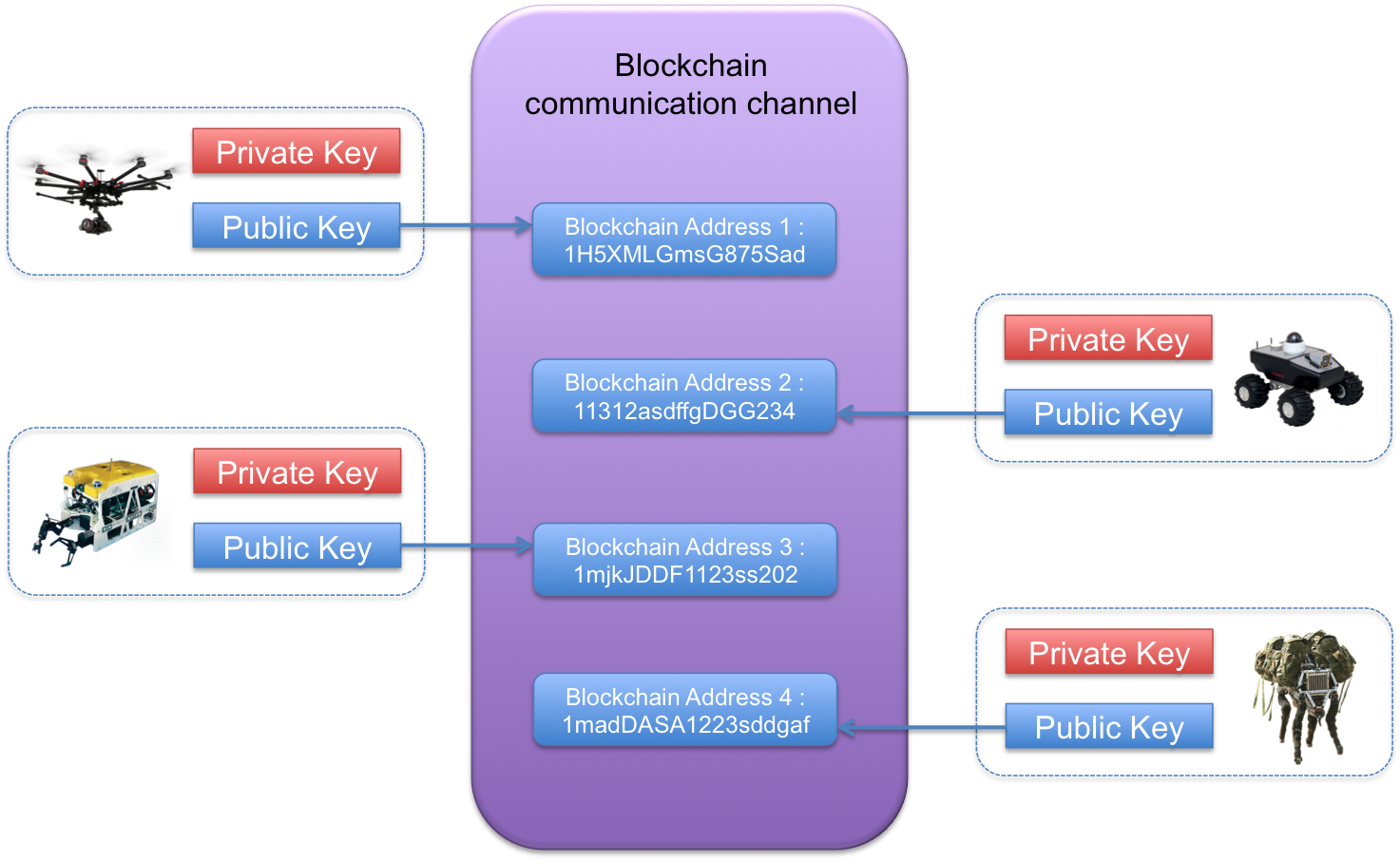
Figure 2: Different types of robots share a blockchain communication channel using their public keys
as main identifiers.
In response to these challenges, new lines of research propose innovative synergies to tackle the current problems existing in the field. For instance, the inclusion of wearable and gaming technologies to reduce the complexity of controlling a robotic swarm by human operators or, using blockchain-based models to create new consensus and business models for large teams of robots.
In order to understand the current state of the art of the distributed robotic systems field and foresee its breakthroughs, the International Journal of Advanced Robotic Systems decided to launch a special issue titled “Distributed Robotic Systems and Society”. This special issue seeks to move beyond the classical view of distributed robotic systems to advance our understanding about the future role of these systems in the marketplace and public society. Insights to unasked questions in the field are especially suited to this issue. For instance, what security methods are available and are efficient for these systems? What kind of distributed robotic algorithms are suitable to introduce human-oriented interactions? Are there new interfaces to connect with these systems or reduce their complexity? Are distributed networks such as Bitcoin a feasible way to integrate distributed robotic systems in our society? Are there new business models for distributed robot ventures? How can distributed robotic systems make use of unlimited access information in the cloud?
We also welcome submissions on other topics addressing multi-robot systems in the society. We seek papers with conceptual and theoretical contributions as well as papers documenting valuable results of experiments conducted with real-robots. Finally, the editorial team of this special issue (Dr. Penaloza, Dr. Hauert, and myself) would like to encourage researchers and scientists to submit their manuscripts. We are confident that the ideas, methods, and results included in this special issue will assist the scientific community as well as the industry to reach new horizons in the field of distributed robotics systems.
tags: c-Research-Innovation, IJARS

AUAI is supported by:









