
Robohub.org
Minesweepers uses robotics’ awesomeness to raise awareness about landmines & explosive remnants of war

Source: DIGGER DTR via Wikimedia Commons.
Paul Jefferson, one of the earliest humanitarian deminers, said “a landmine is the perfect soldier: Ever courageous, never sleeps, never misses”. The simplicity and cost-effectiveness of mines are major factors in explaining their widespread use throughout numerous countries that are now faced with dealing with the landmine and explosive remnants of war contamination problem.
The following facts reflect the seriousness of this problem:
- It is estimated that there are 110 million land mines in the ground right now. An equal amount is in stockpiles waiting to be planted or destroyed.
- Mines cost between $3 and $30, but the cost of removing them is $300 to $1000.
- The cost of removing all existing mines would be $50- to $100-billion.
- According to the ‘International Campaign to Ban Landmines network’, more than 4,200 people, of whom 42% are children, have been falling victim to landmines and ERWs annually in many of the countries affected by war or in post-conflict situations around the world (Fig. 1).
- According to Landmine Monitor, number of landmine and UXO casualties was 11,700 in 2002 and 4286 in 2011.
- Mine and explosive remnant of war casualties occur in every region of the world, causing an estimated 15,000 – 20,000 injuries each year.
- One deminer is killed and two injured for every 5000 successfully removed mines.
- Overall, about 85 per cent of reported land mine casualties are men, many of whom are soldiers. However, in some regions, 30 per cent of the victims are women.
- Mines create millions of refugees or internally displaced people.
- The areas most affected by land mines include: Egypt (23 million, mostly in border regions); Angola (9-15 million); Iran (16 million); Afghanistan (about 10 million); Iraq (10 million); China (10 million); Cambodia (up to 10 million); Mozambique (about 2 million); Bosnia (2-3 million); Croatia (2 million); Somalia (up to 2 million in the North); Eritrea (1 million); and Sudan (1 million). Egypt, Angola, and Iran account for more than 85 per cent of the total number of mine-related casualties in the world each year.
- Until recently, about 100,000 mines were being removed, and about two million more were planted each year.
- If demining efforts remain about the same as they are now, and no new mines are laid, it will still take 1100 years to get rid of all the world’s active land mines.
- For the military, mine detection rates of 80% are accepted since all the military needs are a quick breach in a minefield. For humanitarian mine clearing it is obvious that the system must have a detection rate approaching the perfection of 99.6%.
- The most common injury associated with land mines is loss of one or more limbs. In the United States, the rate of amputation is 1 for every 22 000 people. In Angola, it is 30 for every 10,000.
- In many of the most affected areas of the world, agriculture is the mainstay of the economy. Landmines are planted in fields, forests, around wells, water sources, and hydroelectric installations, making these unusable, or usable only at great risk. Both Afghanistan and Cambodia could double their agricultural production if land mines were eliminated.

Fig. 1 Mine, Explosive Remnants of War (WRW) and Cluster Submunition Casualties in 2011. Courtesy ICBL0CMC 2012.
The humanitarian demining activities carried out to remove landmines and unexploded ordnances (UXOs) or explosive remnants of war (ERW) from the vast contaminated areas are not on the same level of the problem. For example, the conventional mag-and-flag approach uses metal detectors operated by expert technicians to identify targets, which are then flagged for subsequent digging. These conventional methods make the procedure of removing great numbers of landmines very slow, inefficient, dangerous and costly. Even if demining efforts remain about the same as they are now, and no new mines are laid, it will take 1100 years to get rid of all the world’s active landmines .
Robotics systems in the form of autonomous/teleoperated unmanned ground/aerial vehicles can provide efficient, reliable and safe solutions for the problem of the landmine and UXO contamination.
In order to foster robotics research and its applications in the area of humanitarian demining in the world, the IEEE Robotics and Automation Society – Egypt Chapter (2015 IEEE RAS Chapter of the Year Award and 2012 Chapter of the Year in IEEE Region 8) initiated in 2012 Minesweepers: Towards a Landmine-free World as the first international outdoor robotic competition on humanitarian demining. It aims at raising public awareness of the seriousness of the landmines and UXOs contamination, and the role of science and technology in solving this problem. It also motivates professors, engineers and students working on innovative solutions.
As a robotic competition, Minesweepers provide an inspirational and motivational platform for students, researchers and laypersons alike to present their work to a wider forum with extensive media coverage. In this competition, each participating team constructs a teleoperated/autonomous unmanned ground/aerial vehicle that must be able to search for underground and aboveground anti-personnel landmines and UXOs. The position and the type of each detected object are visualized and overlaid on the minefield map. The robot must be able to navigate through rough terrain that mimics a real minefield.
The competition has three main categories:
- Minesweepers–Academia: for undergraduate and postgraduate students, where only metallic objects are available in the competition arena and landmine detection and minefield mapping are required.
- Minesweepers-Juniors: for elementary and high school students, where only metallic objects are available in the competition arena and only landmine detection is required.
- Minesweepers–Industry: for professional companies, where metallic and non-metallic objects with different dimensions and profiles are available in the competition arena and landmine detection, landmine imagining and minefield mapping are required.
The competition arena is an open 20x20m desert/wood area (Fig. 2). The field is surrounded by a 30cm-high wall. The landmine contaminated zones in the arena start 50 cm from each the boarders. Sandy soils, inclines, ditches, rocks and other obstacles challenge the robots to navigate the arena.

Fig. 2 Competition arena with surface and buried mines.
Two different kinds of artificial mines are used in this competition:
- Buried Mines: These mines are metallic and/or minimum metal objects of different dimensions and shapes. The metallic objects will be made of steel while the minimum metal objects will be made of different materials such as plastic and wood. The minimum metal objects will contain few small metallic parts that real landmine’s spring, striker tip, or shear wire. These objects are completely buried underground with maximum depth 10 cm. They mimic real anti-personnel (AP) blast mines. Real AP blast mines are deliberately designed to be small (typically 6-14 cm in diameter): this makes them cheaper and easier to store, carry and deploy. AP blast mines rely on the effect of explosive blast to damage the victim, and are designed to detonate when the victim steps on them. These mines are often buried in order to camouflage their presence.
- Surface Mines: These objects are similar to the buried objects described and are labeled in black color to facilitate vision-based detection and localization. These objects are visible and are located on the surface of the competition area. Any contact with them will be penalized. These black objects are used to simulate aboveground mines and unexploded ordnance (UXOs). An unexploded ordnance is a piece of explosive ordnance or ammunition that has failed to function as intended. Although they have failed to function as intended, UXO can sometimes require only the slightest disturbance to detonate. UXOs vary greatly in size from hand grenades the size of an apple to large aircraft bombs.
Some landmines will be organized in a pattern for easier removal and accountability and others will be scattered randomly. Locations of each landmine will be known by the jury committee.
Each team must use a teleoperated or an autonomous robot per game. The robot has to be made by team members. Teleoperated robot must be operated remotely from a base station located outside the minefield. Wireless controller based on ZigBee, for example, would be recommended to communicate the base station with the robot due to the large size of the field. In case of autonomous robots, all the actions of the robot must be completely autonomous without any human intervention. Autonomous robots will be rewarded a 40% bonus over teleoperated robots. Careful attention must be paid to the robot locomotion systems as the roughness of the terrain is very high. Both unmanned ground vehicles (UGVs) and unmanned aerial vehicles (UAVs) are allowed. Robots can be actuated using electric, pneumatic or hydraulic actuation system, diesel/petrol engine or using solar energy.
Each team can select their own set of sensors for localizing the mines. Although teams can install cameras on their robot or install them on the sides of the field, no cameras or sensors are allowed to hang over the competition area.
When a robot detects a mine, it must autonomously report this event using a light blinking signal and/or a warning siren for at least 2 seconds. The robot must also visualize and lay the type and position of the detected mine on the minefield map.
Each demining robot must provide map of the detected mines when its competition time slot finishes. The map represents a 19x19m area divided to 1x1m squares based on the common reference frame of the arena. This map can be simply a text file or text shown on the display of the robot or the base station. The sequence of the positions must be the same as the detected mines. This mine map can be represented graphically or using vector format.
The competition is organized in three rounds:
- Eligibility round: All the registered teams submit a technical report and upload a 3-minutes video to the YouTube channel of the competition showing the preliminary design and the operation of their robot.
- Classification round: All the ready robots participate in order established by gambling. The teams are sorted based on the score obtained in this round. In case of equality in number of points, the robot that finis9hed the course in minor time wins. The 8 best teams are classified for the final round. If insufficient number teams have finished the classification round, the jury committee selects some of the unclassified teams to participate in the final round.
- Final Round: The classified teams have to realize a final course, being winning the best classified one according to the same guidelines. Also required from top 8 teams to give a 15 min technical presentation on a jury panel talking about their work and robot. The total score is the sum of mission score and presentation score.
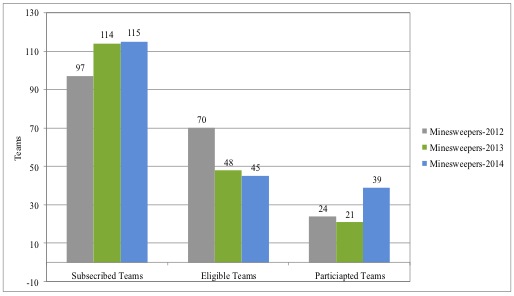
Fig. 3 Number of teams in the previous three editions of the competition.
The competition first began in 2012 as a local competition in Egypt, the country most contaminated by landmines in the world. The competition was converted in 2013 into an international competition where teams from different countries participate. Last year competition toke place in Coimbra, Portugal and this year competition will take place August 19-21 in Antofagasta, Chile and is organized by the Universidad Catolica del Norte in conjunction with The 6th International Conference on Computing and Informatics in Northern Chile (INFONOR-Chile 2015).

Fig. 4 Robots from the previous three editions of the competition.
The ultimate goal of the Minesweepers competition is to put into practice the new strategic mission of IEEE, “…to foster technological innovation and excellence for the benefit of humanity” and to serve as an educational and a research forum to provide efficient, reliable, adaptive and cost-effective solutions for the serious problem of humanitarian demining in many affected countries in the world. The competition also motivates the participants to create new companies and industries geared towards minefield reconnaissance and mapping technologies. Moreover, the applicability of the robotic systems presented in this competition can be extended to a wide range of other applications such as security and surveillance, search and rescue, health monitoring of civil infrastructure, pipeline monitoring, and environment monitoring.
Minesweepers: Towards a Landmine-free World is organized in collaboration with Hadath for Innovation and Entrepreneurship and IEEE RAS Egypt Chapter. The competition is technically co-sponsored by IEEE RAS Special Interest Group on Humanitarian Technology (RAS-SIGHT) and is supported by Executive Secretariat for the Demining & Development of the North West Coast, Mines Action & Human Rights Foundation and Protection against Armaments & Consequences and African Robotics Network (AFRON).
For information about Minesweepers, please visit:
- Website: http://www.landminefree.org
- Facebook page: https://www.facebook.com/LandmineFreeWorld
- Facebook Group: https://www.facebook.com/groups/minesweepers
- Twitter: https://twitter.com/LandmineFree
- Youtube: http://www.youtube.com/channel/UCD2bYR2CLeKpFfQdoiDyeww
tags: c-Military-Defense, cx-Events, cx-Politics-Law-Society, demining, Egypt

AUAI is supported by:









