
Robohub.org
Mobile robots fight against deadly legacies of war

Unmanned Ground and Arial Vehicles in previous editions of Minesweepers competition
Landmines are one of the most lethal weapons in modern warfare. In the military, they are considered the perfect soldier: Ever courageous, never sleeps, never misses. The simplicity and cost-effectiveness of mines are major factors in explaining the widespread use throughout numerous countries, who are now faced with the mine contamination problem. The civilian-purpose demining or humanitarian demining aims at finding and removing abandoned landmines, without any hazard to the environment.
According to Landmine and Cluster Munition Monitor as of October 2015, 57 States and 4 other territories are affected by antipersonnel mines, including 33 states parties in Ottawa Treaty and 24 states not party to the treaty. Five additional states parties are suspected of being contaminated with mines or have residual contamination. It is estimated that there are more than 110 million active mines scattered in these 62 countries.
Landmines kill more than 5,000 people annually, of which, 46% are children, and there are 15,000-20,000 injuries each year. This serious problem hinders economic development of rich areas in affected countries. Landmines are planted in fields, forests, around wells, water sources, and hydroelectric installations, making these unusable, or usable only at great risk. Both Afghanistan and Cambodia could double their agricultural production if landmines were eliminated.
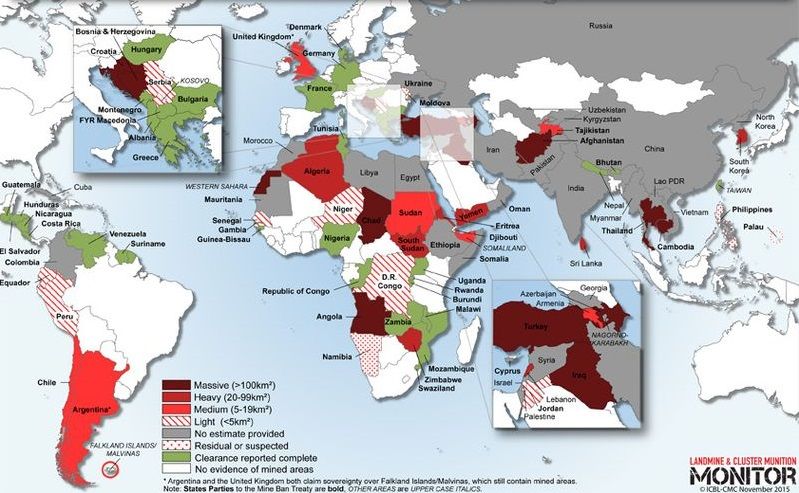
Mine contamination as of November 2015 Courtesy: Landmine and Cluster Munition Monitor ICBL-CMC
Thanks to international initiatives, Landmine and Cluster Munition Monitor declared that at least 200 km2 of contaminated land was cleared in 2014, an increase from 185 km2 in 2013, and more than 230,000 antipersonnel mines and 11,500 antivehicle mines were destroyed. 75% of recorded clearance occurred in Afghanistan, Cambodia and Croatia. Over the past five years, approximately 976 km2 of contaminated land has been cleared, and almost 1.48 million antipersonnel mines and more than 82,000 anti-vehicle mines were destroyed. In September 2015, Mozambique has declared to be free of mines. In November 2015, 29 states and one territory are declared free of mines since the entry into force of the Treaty in 1999.
However, the humanitarian demining activities carried-out to remove landmines and unexploded ordnances (UXOs) from the vast contaminated areas in the world are still not on the same level of the problem. While basic landmine detection and neutralizing theologies remain almost the same, landmine technology improved dramatically resulting in more than 2000 different types of mines around the world; among these, there are more than 650 different types of anti-personnel landmines. The conventional demining techniques commonly used nowadays make the mission of removing a great numbers of landmines very slow, labor intensive, costly, inefficient, extremely dangerous and stressful process. If demining efforts remain about the same as they are now, and no new landmines are laid, it would still take 1100 years to get rid of all the world’s active landmines using the conventional approaches.
Robotics systems can provide efficient, reliable, fast and cost effective solution for the problem of the landmines and UXO contamination.
Minesweepers competition
In order to foster robotics research and its applications in the area of humanitarian demining, Minesweepers: Towards a Landmine-free World was created as the first outdoor robotic competition on humanitarian demining. This competition aims at raising public awareness of the seriousness of landmines and unexploded ordnances (UXOs) contamination and fostering robotics research and its applications in the area of humanitarian demining in the world.
Robotic competitions provide inspirational and motivational platforms for students, researchers and laypersons alike, to present their work to a wider forum with extensive media coverage. In this competition, each participating team constructs a teleoperated/autonomous unmanned ground/aerial vehicle that must be able to search for buried and surface-laid anti-personnel landmines and UXOs. The position and the type of each detected object are visualized and overlaid on the minefield map. The robot must be able to navigate through rough terrain that mimics a real minefield.
The first two editions of Minesweepers competition took place at German University in Cairo, Egypt, third edition was hosted by Institute of Systems and Robotics at University of Coimbra, Portugal and the fourth edition was organized by Universidad Católica del Norte (Catholic University of the North) in Chile.
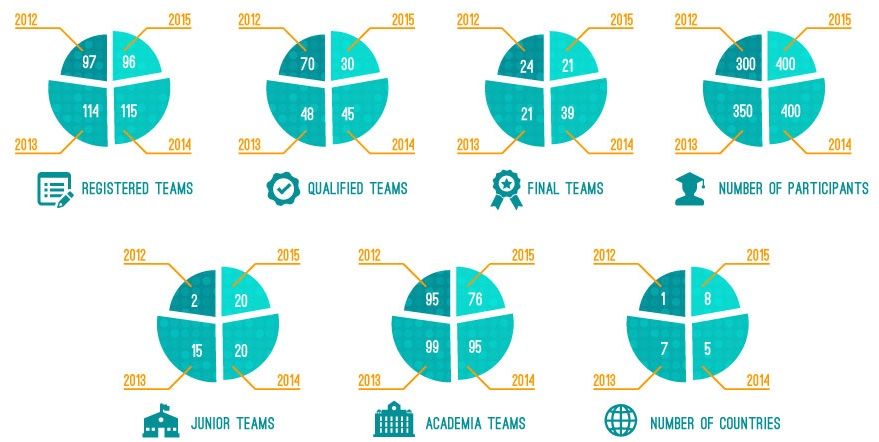
Statistics about the four previous editions of Minesweepers competition
The fifth edition of Minesweepers competition is hosted by Zewail City of Science and Technology in conjunction with Second International Workshop on Recent Advances in Robotics and Sensor Technology for Humanitarian Demining and Counter-IEDs (RST) in October 27-30, 2016. Latin America regional round will be organized by Universidad Católica del Norte in Chile. The competition is organized in collaboration with IEEE RAS Egypt Chapter (2015 IEEE RAS Chapter of the Year and 2012 Chapter of the Year in IEEE Region 8) and Hadath for Innovation and Entrepreneurship.
The competition is organized under the auspices of IEEE Robotics & Automation Society – Special Interest Group on Humanitarian Technology (RAS–SIGHT) and is supported by Canadian Landmine Foundation, Executive Secretariat for the Demining & Development of the North West Coast, Mines Action & Human Rights Foundation and Protection against Armaments & Consequences and African Robotics Network (AFRON).

Arena of the final round of the 4th edition of Minesweepers in the historic Ruins of Huanchaca in Antofagasta, Chile
Five categories in the competition
1) Minesweepers-Juniors: for elementary and high school students where only metallic objects are available in the competition arena and only landmine detection is required.
2) Minesweepers–Academia: for undergraduate and postgraduate students where only metallic objects are available in the competition arena and both landmine detection and minefield mapping are required.
3) Minesweepers–Industry: for professional companies where metallic and non-metallic objects with different dimensions and profiles are available in the competition arena and landmine detection, landmine imagining and minefield mapping are required.
4) Special Category-I Multiple Minesweepers: The objective of this new category is to mimic the conventional mag-and-flag approach or SOP using multiple unmanned teleoperated and autonomous vehicles. Teleoperated vehicles play the role of human deminers while an autonomous vehicle is used to mimic the supervisor/team leader’s role. The team leader has to be equipped with a gripper or a marking mechanism to mark the location of the landmine detected by the deminers. More than one deminer can be integrated into the team but only one supervisor or team leader is allowed. No mapping is required in this category. However, the robot team has to be able to work cooperatively in detecting metallic surface-laid and buried objects and marking their location in the arena.
5) Special Category-II ROS Minesweepers: The main requirement to participate in this category is to build the software system of the robot using Robot Operating System (ROS). ROS is an open source platform that provides a set of software libraries and tools to build robot applications. It provides hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more. Building the robot based on ROS allows the Minesweepers participants making use of interesting software module and the high fidelity simulator developed by the participants of the different editions of Humanitarian Robotics and Automation Technology Challenge (HRATC) organized by IEEE RAS–SIGHT.
Objectives of Minesweeper competition
The objective of Minesweepers competition is two-fold. First is to provide technical challenge to motivate new research and applications of mobile robotics in the area of humanitarian demining. Second is to provide educational forum to teach different aspects related to mobile robotics and humanitarian demining through Frequently-Asked Question (FAQ), Facts about landmines page, Resources page, emails, social media (Facebook, Twitter and Google+) and a set of technical webinars. Different webinars are broadcast to help the participating teams in constructing the demining robots covering different related topics such as unmanned ground vehicles, unmanned aerial vehicles, robot perception and navigation, Robot Operating System (ROS), landmine detection, wireless communication and multirobot systems.
The ultimate goal of the Minesweepers competition is to put into practice the new strategic mission of IEEE, “…to foster technological innovation and excellence for the benefit of humanity” and to serve as an educational and a research forum to provide efficient, reliable, adaptive and cost-effective solutions for the serious problem of humanitarian demining in many affected countries in the world. The competition also motivates the participants to create new companies and industries geared towards minefield reconnaissance and mapping technologies. Moreover, the applicability of the robotic systems presented in this competition can be extended to a wide range of other applications such as security and surveillance, search and rescue, health monitoring of civil infrastructure, pipeline monitoring, and environment monitoring.
For more information about the Minsweeper challenge, you can visit their website, Facebook page, Facebook group, Twitter, and YouTube.
tags: c-Events, cx-Military-Defense

AUAI is supported by:









