
Robohub.org
OpenStreetMap support in Gazebo
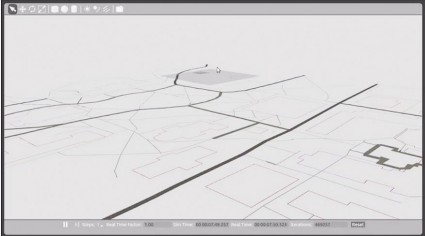 During her internship as part of the Gnome Outreach Program for Women, Tashwin Khurana developed a tool for downloading data from the OpenStreetMap database to produce a corresponding world file for Gazebo. Tashwin focused on importing roads, traffic signals, and buildings, and provided support for a new shape type: the extruded polyline. The two-dimensional shape is defined with a series of points that can be extruded to form a solid object, which can be very useful for visualizing buildings and similar constructions.
During her internship as part of the Gnome Outreach Program for Women, Tashwin Khurana developed a tool for downloading data from the OpenStreetMap database to produce a corresponding world file for Gazebo. Tashwin focused on importing roads, traffic signals, and buildings, and provided support for a new shape type: the extruded polyline. The two-dimensional shape is defined with a series of points that can be extruded to form a solid object, which can be very useful for visualizing buildings and similar constructions.
Khurana is a M.S. student in Computer Science from Lehigh University.
References:
Repositories:
https://bitbucket.org/osrf/gazebo
https://bitbucket.org/tkhurana/gazebo
https://bitbucket.org/tkhurana/sdformat
tags: c-Education-DIY, Gazebo, Mapping-Surveillance, OSRF

Open Source Robotics Foundation
supports the development, distribution, and adoption of open source software for use in robotics research, education, and product development.
Open Source Robotics Foundation
supports the development, distribution, and adoption of open source software for use in robotics research, education, and product development.
Related posts :
Robot Talk Episode 126 – Why are we building humanoid robots?
Robot Talk
20 Jun 2025
In this special live recording at Imperial College London, Claire chatted to Ben Russell, Maryam Banitalebi Dehkordi, and Petar Kormushev about humanoid robotics.
Gearing up for RoboCupJunior: Interview with Ana Patrícia Magalhães
AIhub and Lucy Smith
18 Jun 2025
We hear from the organiser of RoboCupJunior 2025 and find out how the preparations are going for the event.
Robot Talk Episode 125 – Chatting with robots, with Gabriel Skantze
Robot Talk
13 Jun 2025
In the latest episode of the Robot Talk podcast, Claire chatted to Gabriel Skantze from KTH Royal Institute of Technology about having natural face-to-face conversations with robots.
Preparing for kick-off at RoboCup2025: an interview with General Chair Marco Simões
AIhub and Lucy Smith
12 Jun 2025
We caught up with Marco to find out what exciting events are in store at this year's RoboCup.
Interview with Amar Halilovic: Explainable AI for robotics
AIhub
10 Jun 2025
Find out about Amar's research investigating the generation of explanations for robot actions.
Robot Talk Episode 124 – Robots in the performing arts, with Amy LaViers
Robot Talk
06 Jun 2025
In the latest episode of the Robot Talk podcast, Claire chatted to Amy LaViers from the Robotics, Automation, and Dance Lab about the creative relationship between humans and machines.
Robot Talk Episode 123 – Standardising robot programming, with Nick Thompson
Robot Talk
30 May 2025
In the latest episode of the Robot Talk podcast, Claire chatted to Nick Thompson from BOW about software that makes robots easier to program.
Congratulations to the #AAMAS2025 best paper, best demo, and distinguished dissertation award winners
AIhub
29 May 2025
Find out who won the awards presented at the International Conference on Autonomous Agents and Multiagent Systems last week.


