
Robohub.org
Photos from the Airbus Shopfloor Challenge
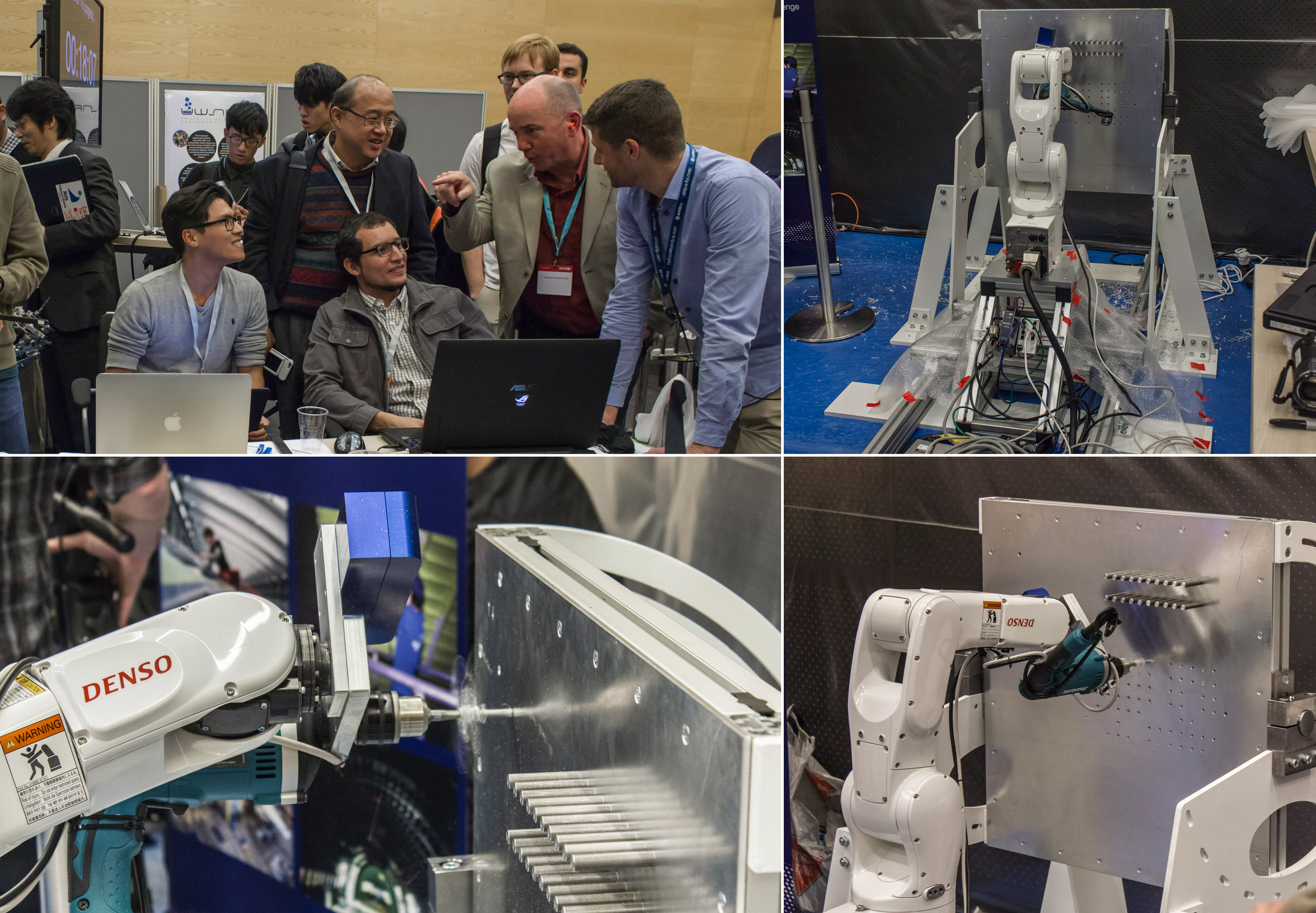
Robohub covered the Airbus Shopfloor Challenge that took place during #ICRA16 in Stockholm. Below, you can see an extensive photo gallery as part of our coverage. Check it out!
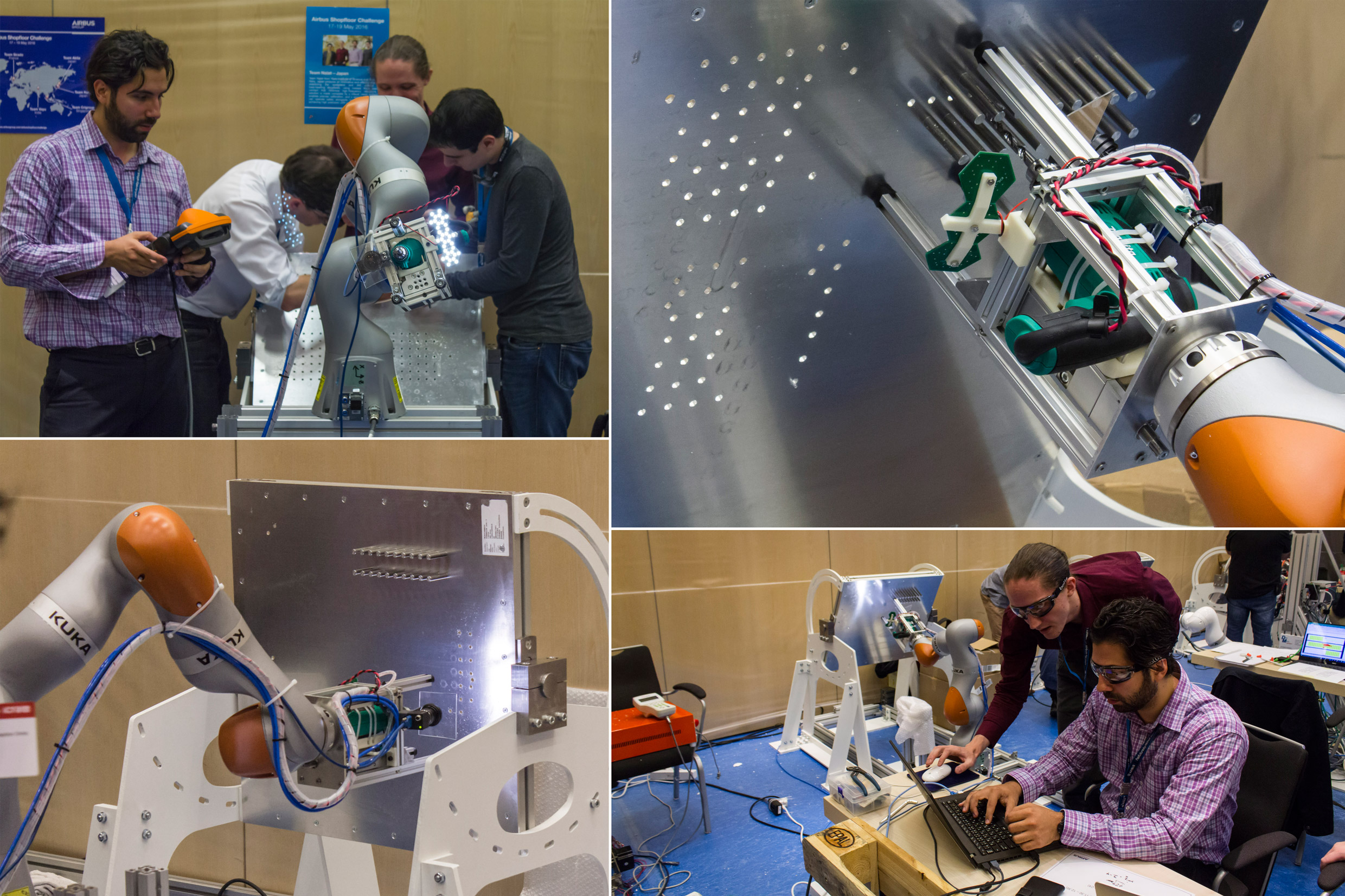
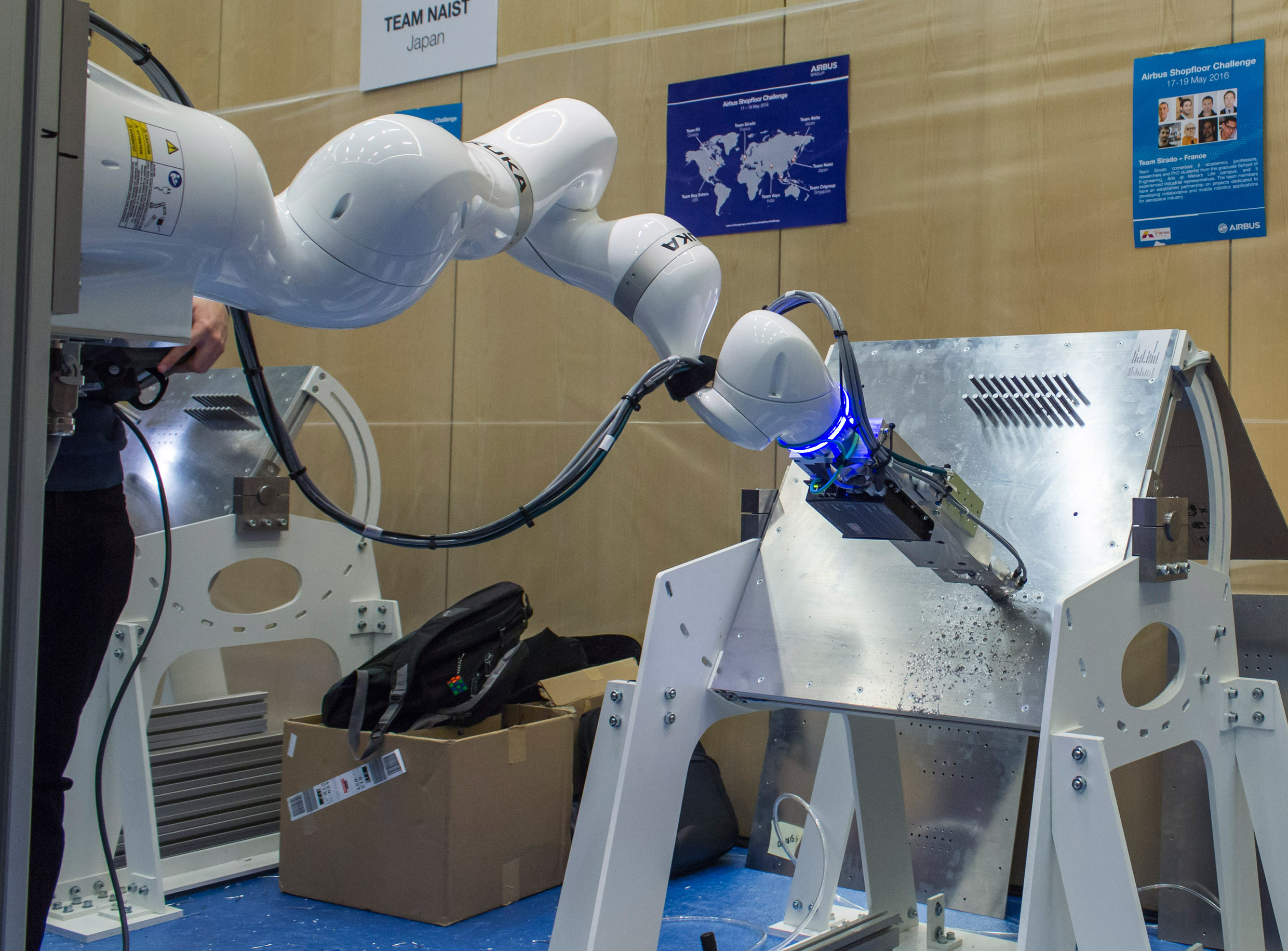
Team Naist
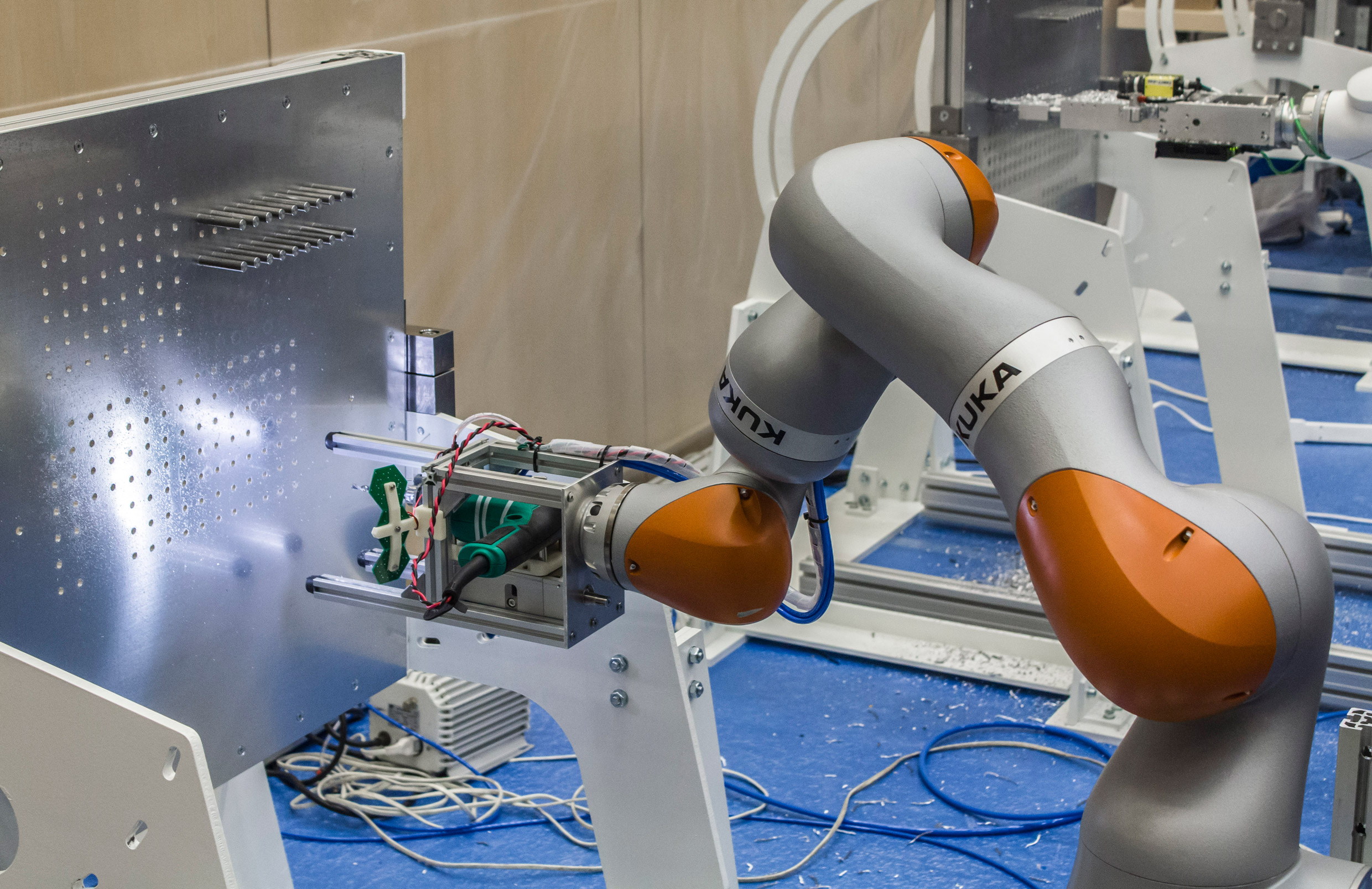
Team Naist, from Nara Institute of Science and Technology, Japan won first prize. They used a KUKA robot arm, an advanced head with stabilizing rods, and an advanced computer vision system that enabled them to drill holes efficiently and with great precision.


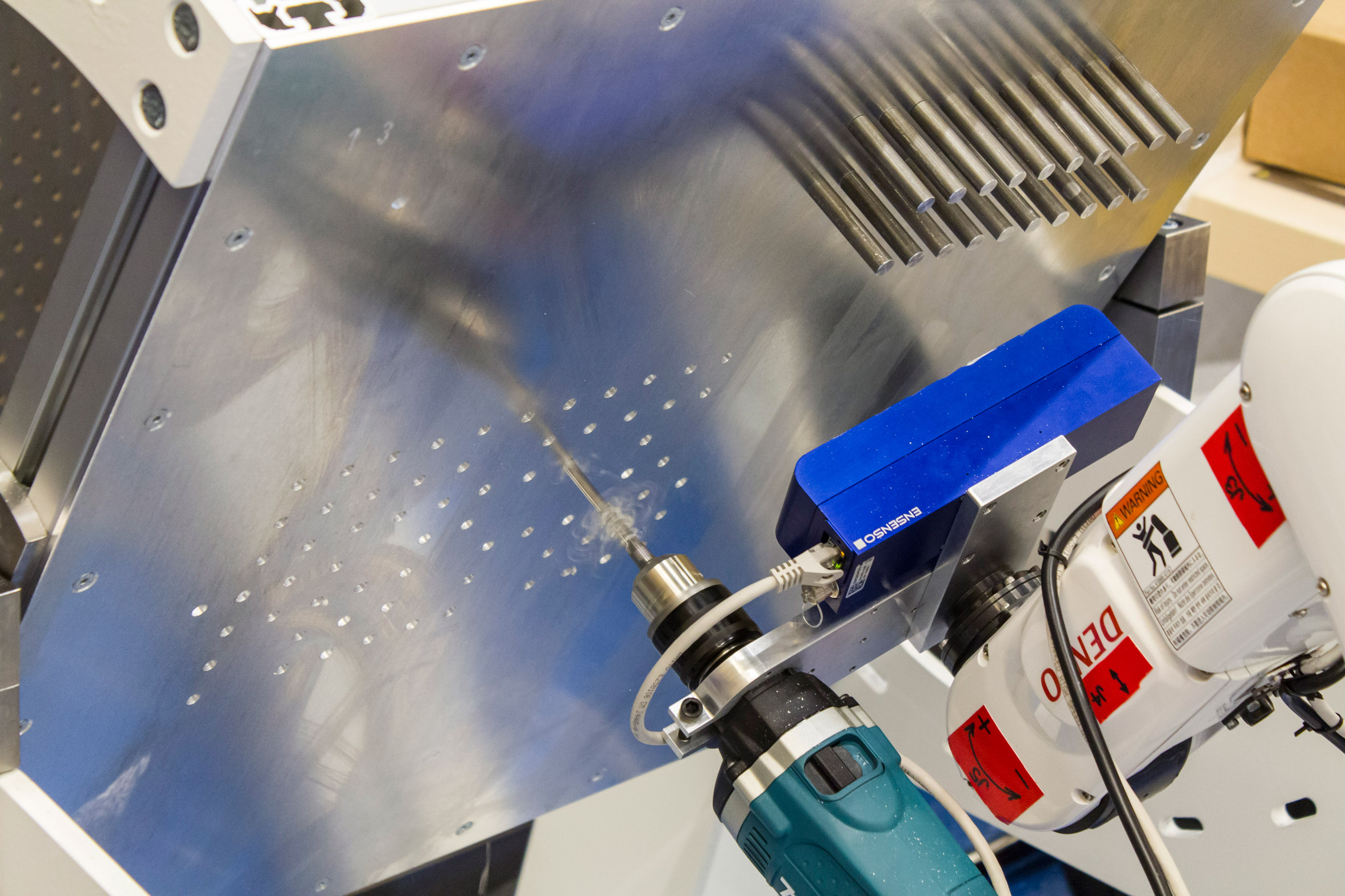
Team CriGroup
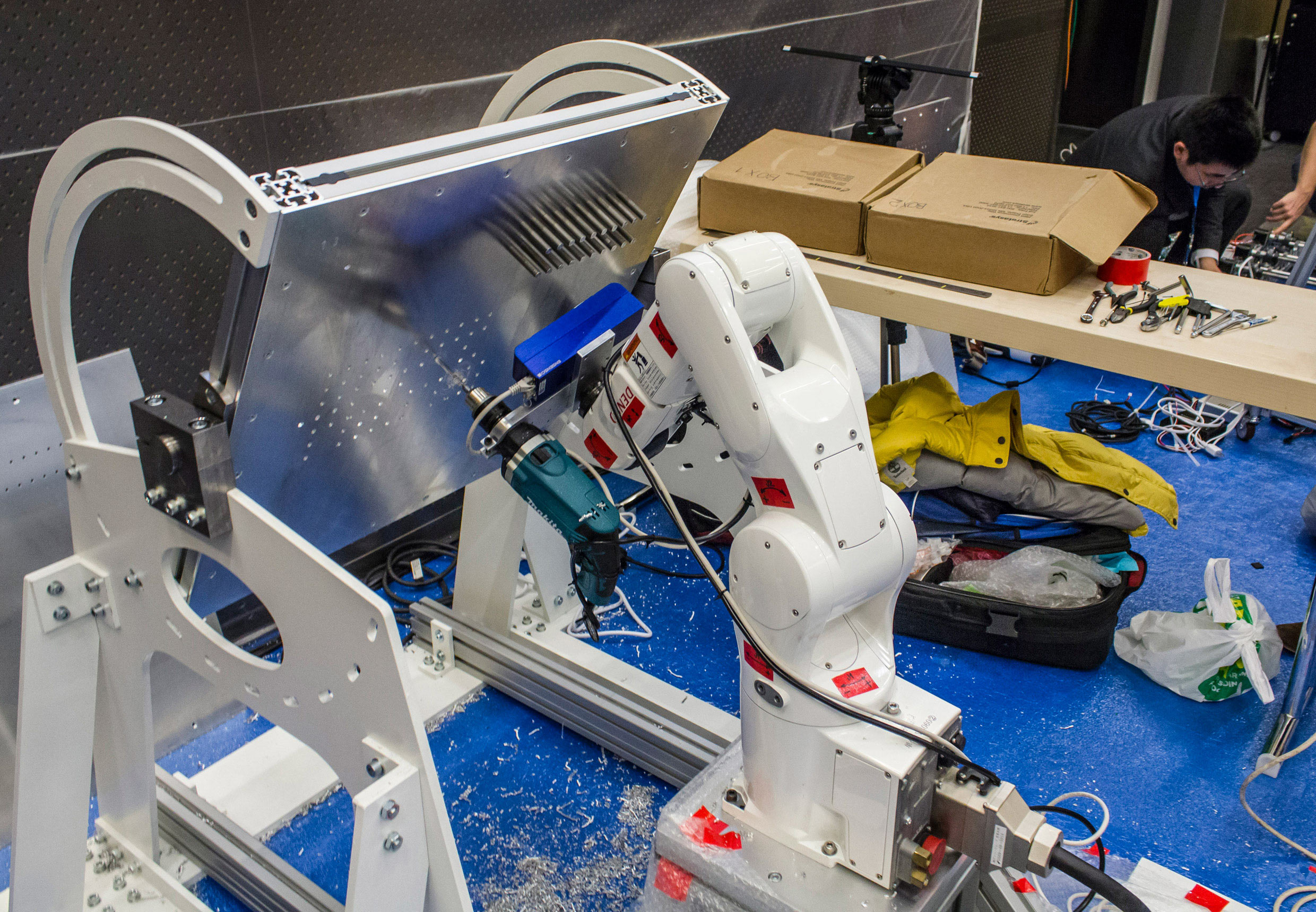
Team CriGroup is based at the School of Mechanical and Aerospace Engineering, within Nanyang Technological University in Singapore. They used ready made parts and a Denso arm with a special focus on software. Their method produced an innovative drilling pattern that minimized robot motion. They came in second place.
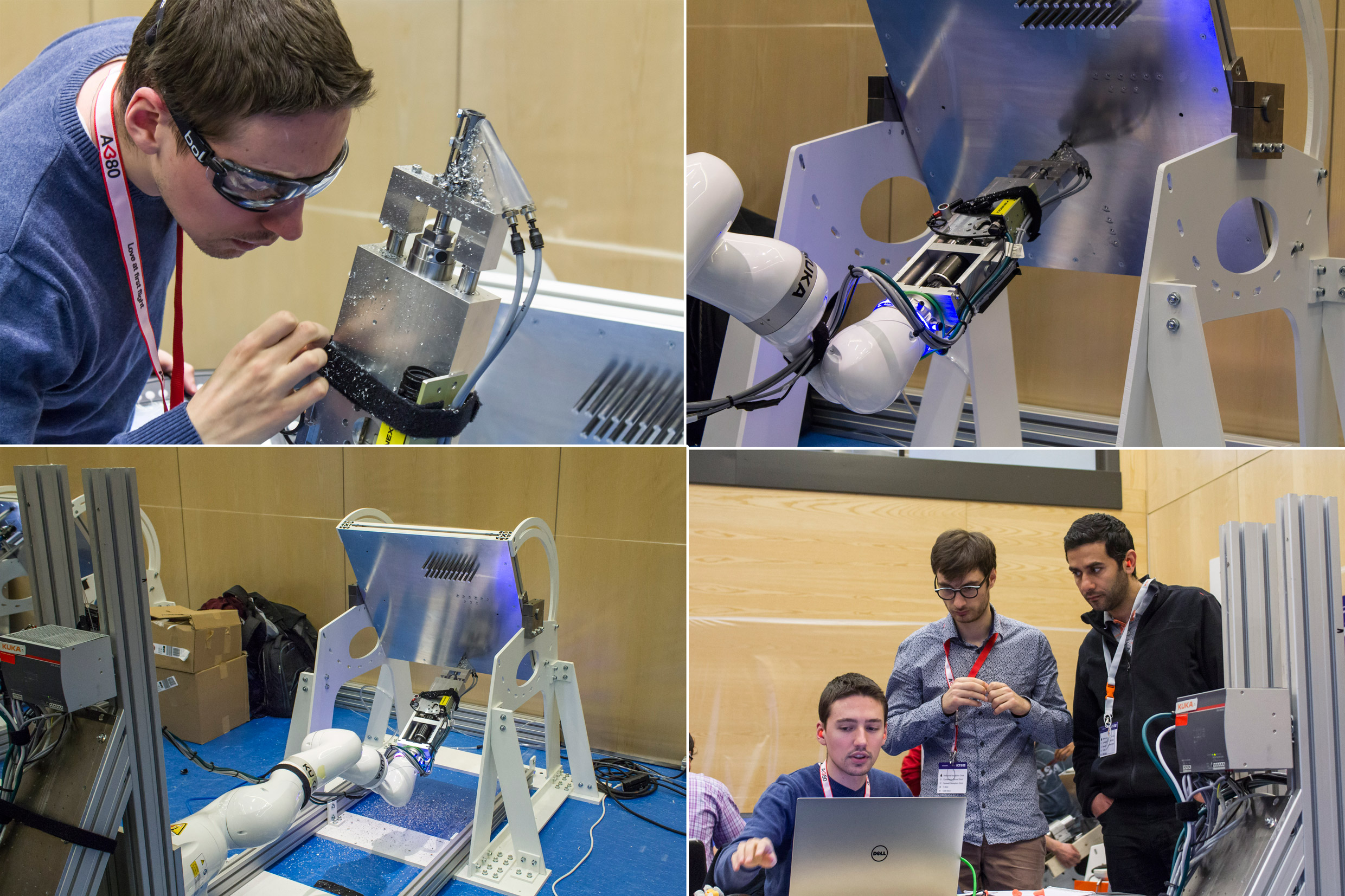
Team Sirado
Team Sirado brings together 6 researchers from the graduate School of Engineering, Arts et Métiers Lille campus, and 3 experienced industrial representatives from KUKA Systems Aerospace France, and KUKA Automatisme Robotique SAS. They also used a KUKA arm and a specially designed drill unit. Sirado took third place in the competition.
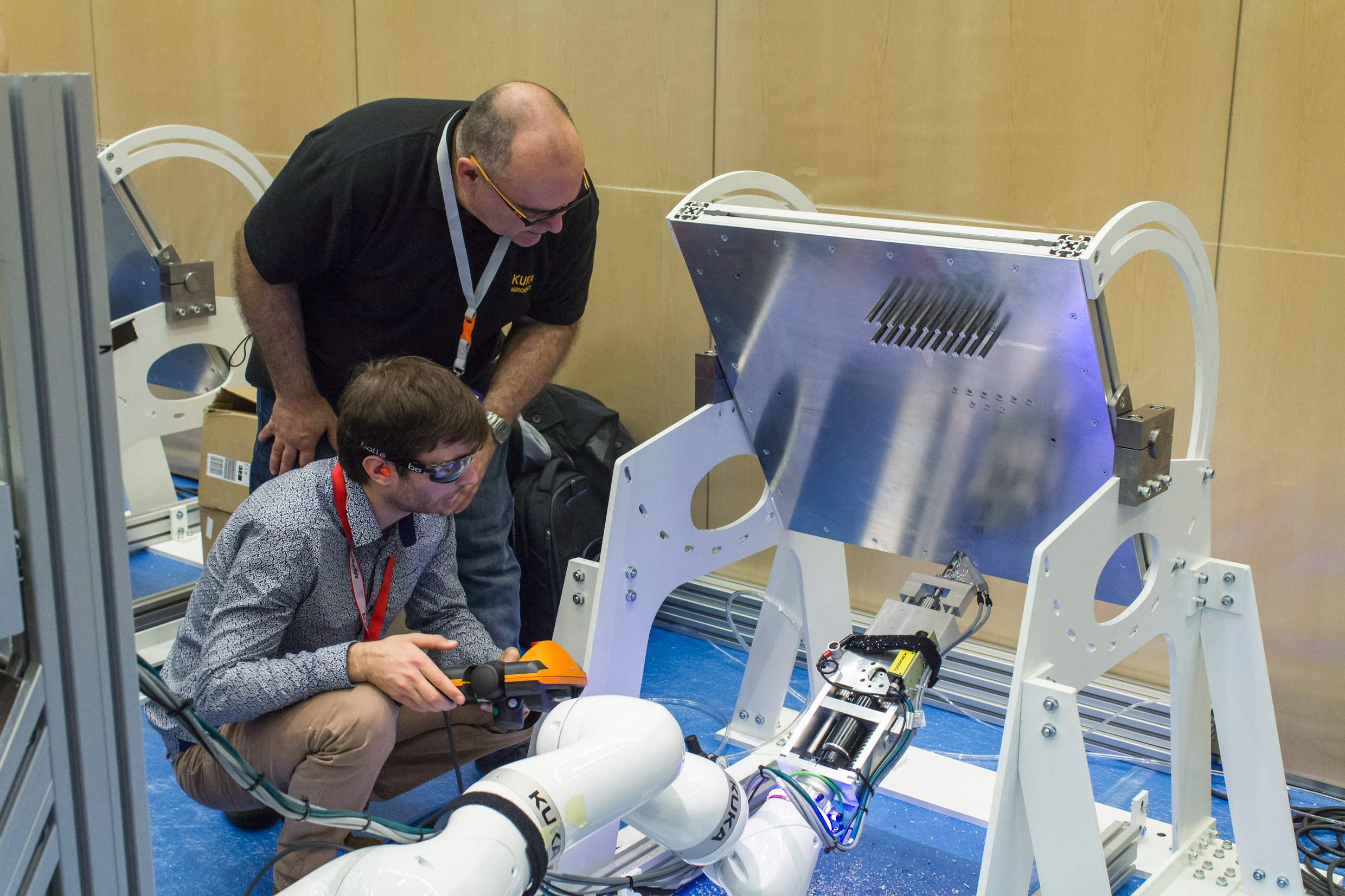
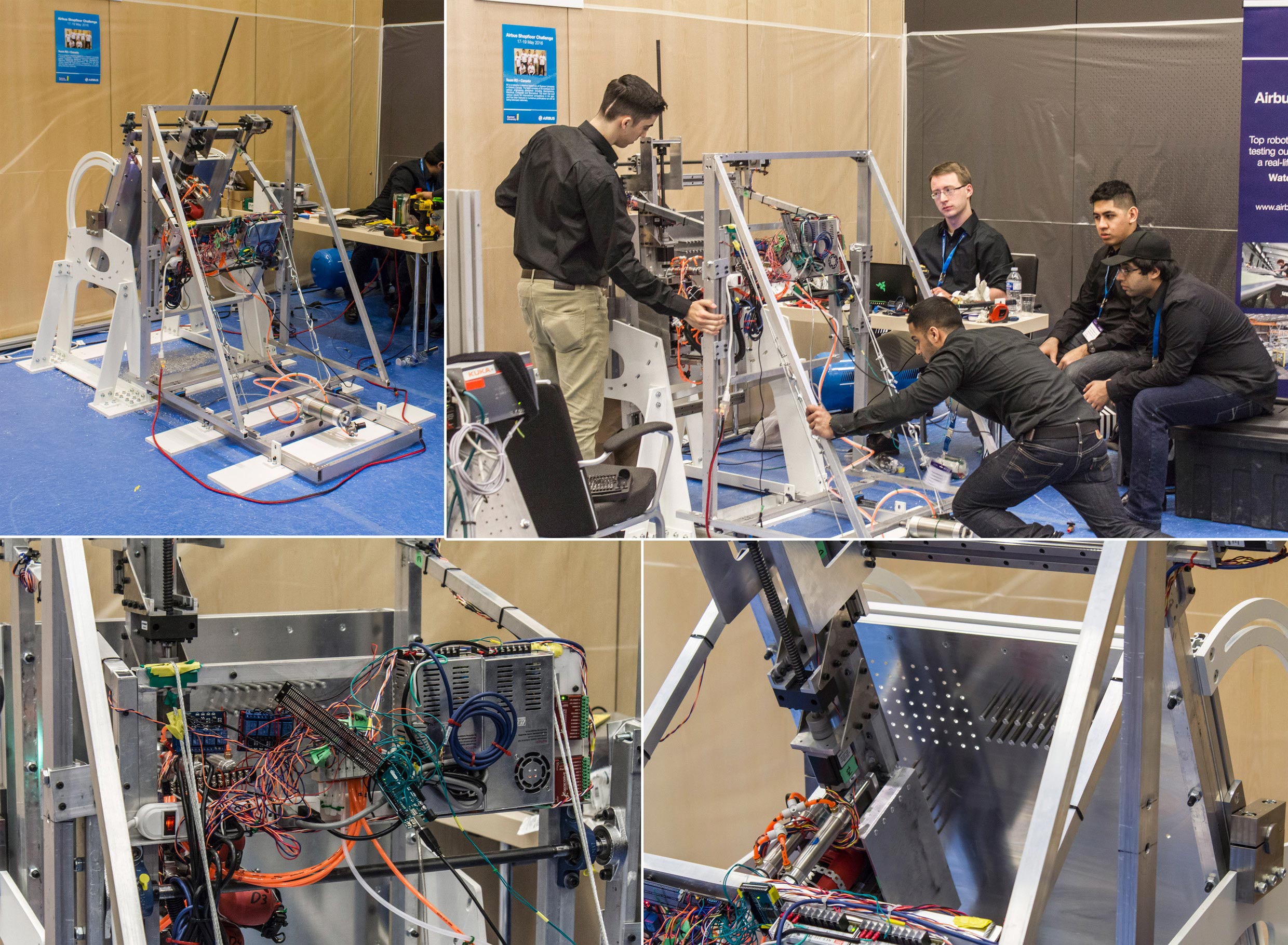
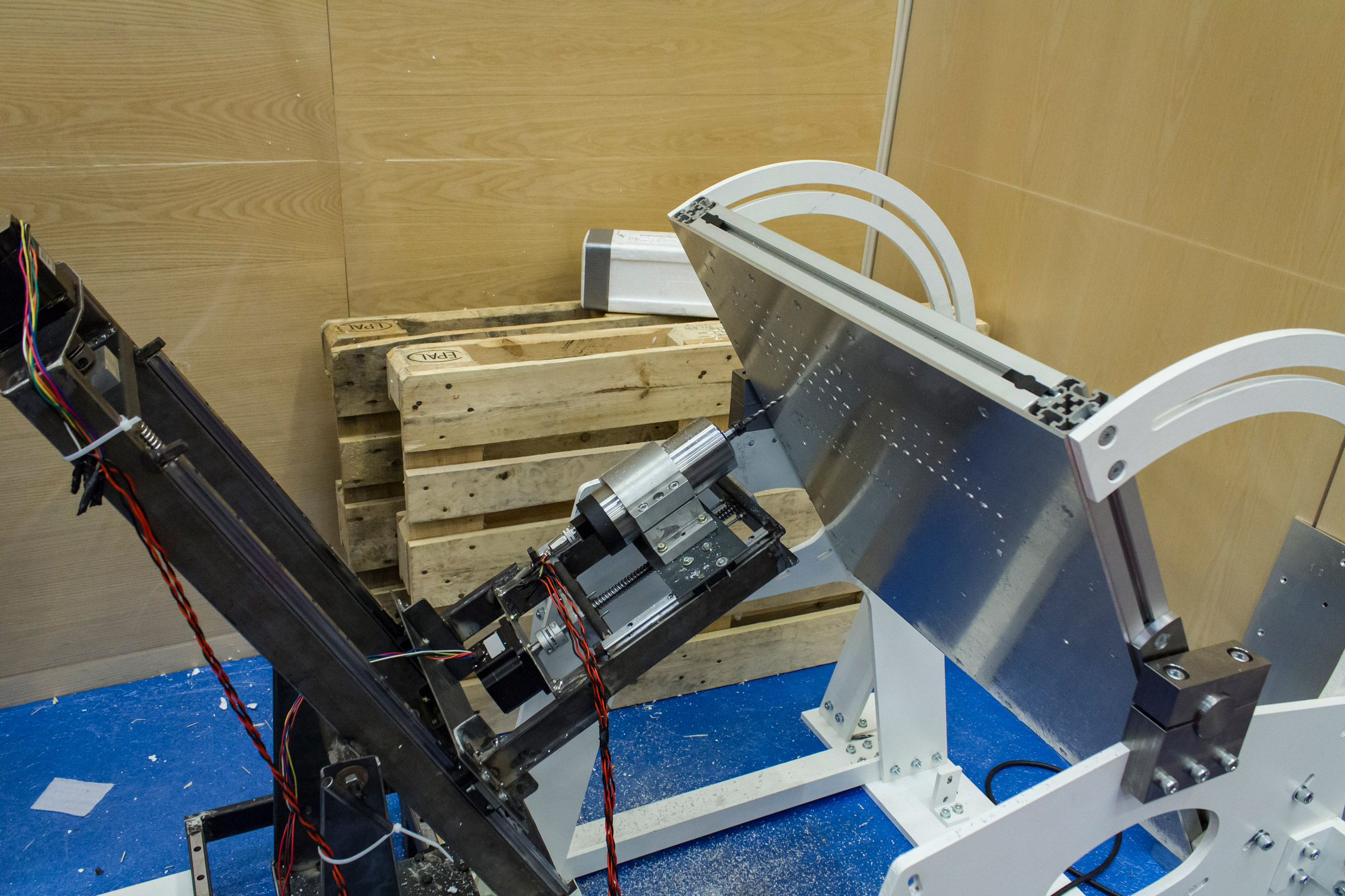
Team R3
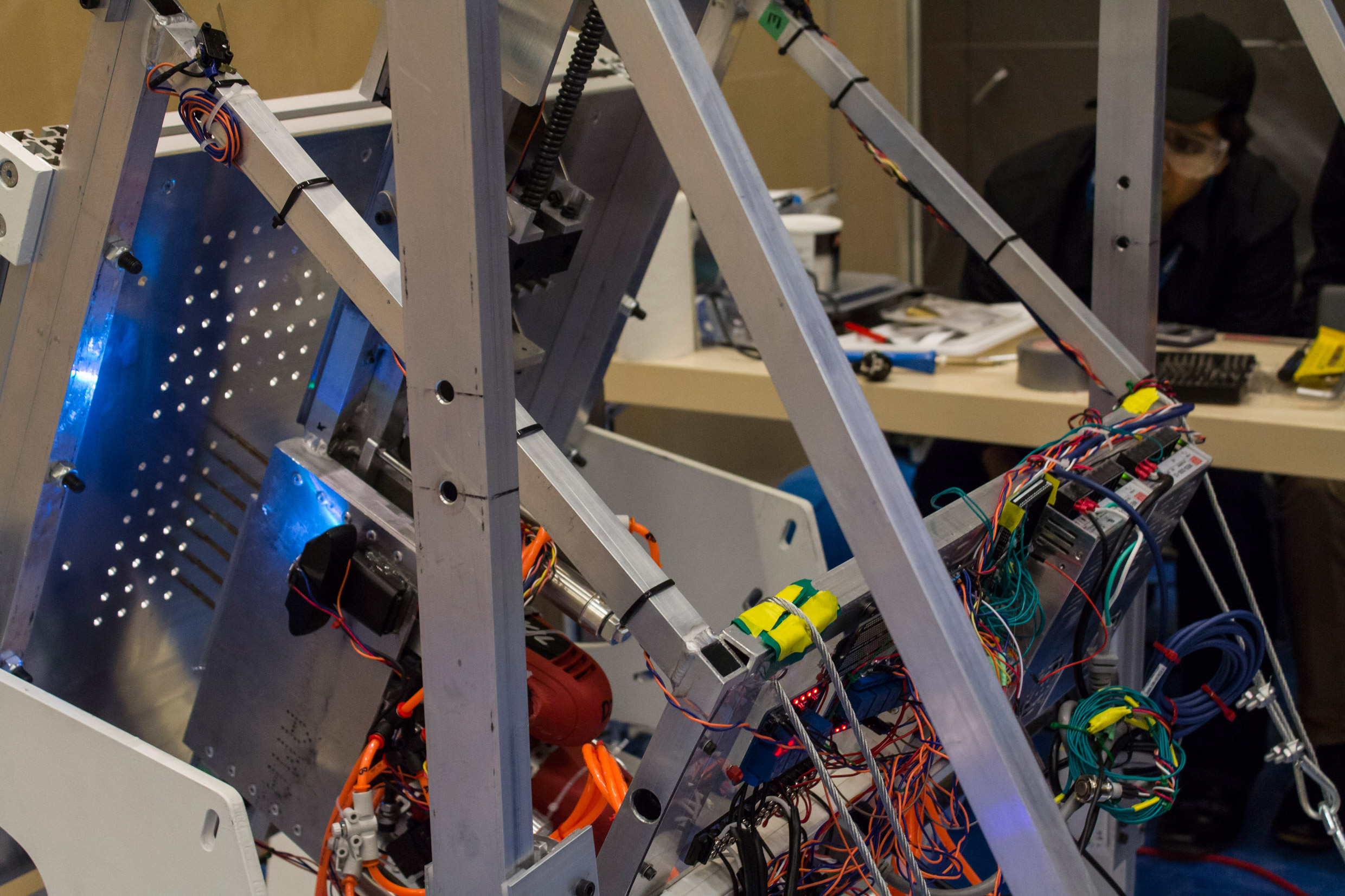
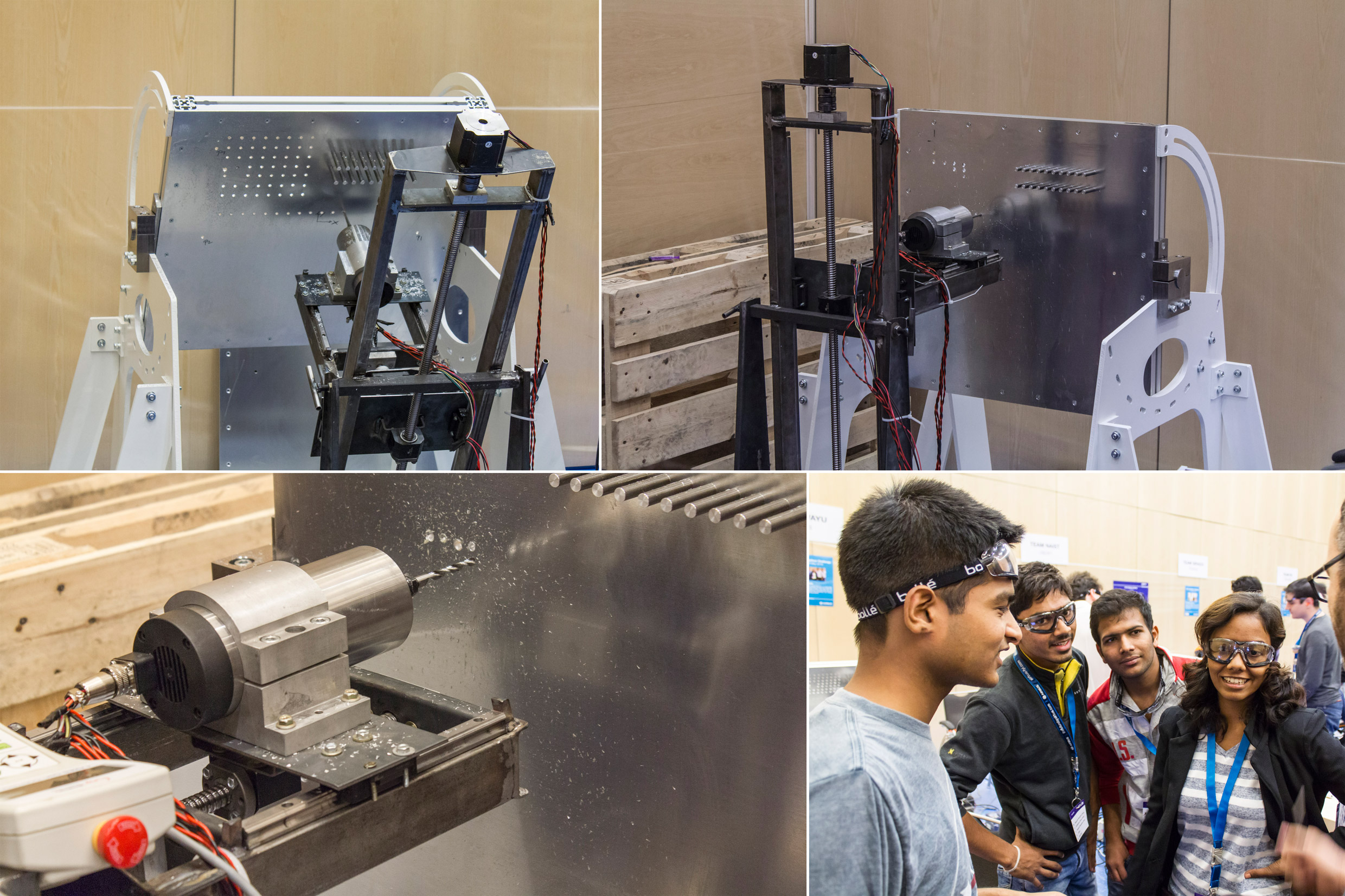
R3 is a robotics collective based out of Ryerson University in Ontario, Canada. Their custom-made XY platform used 7 drill bits in one unit to drill many holes at once. They performed two rounds and competed on the final round.
Team Vayu
Team Vayu from India brings together five undergraduate students who share a passion for aerospace. They had the simplest approach with a compact 3 axis robot that performed well throughout the challenge.
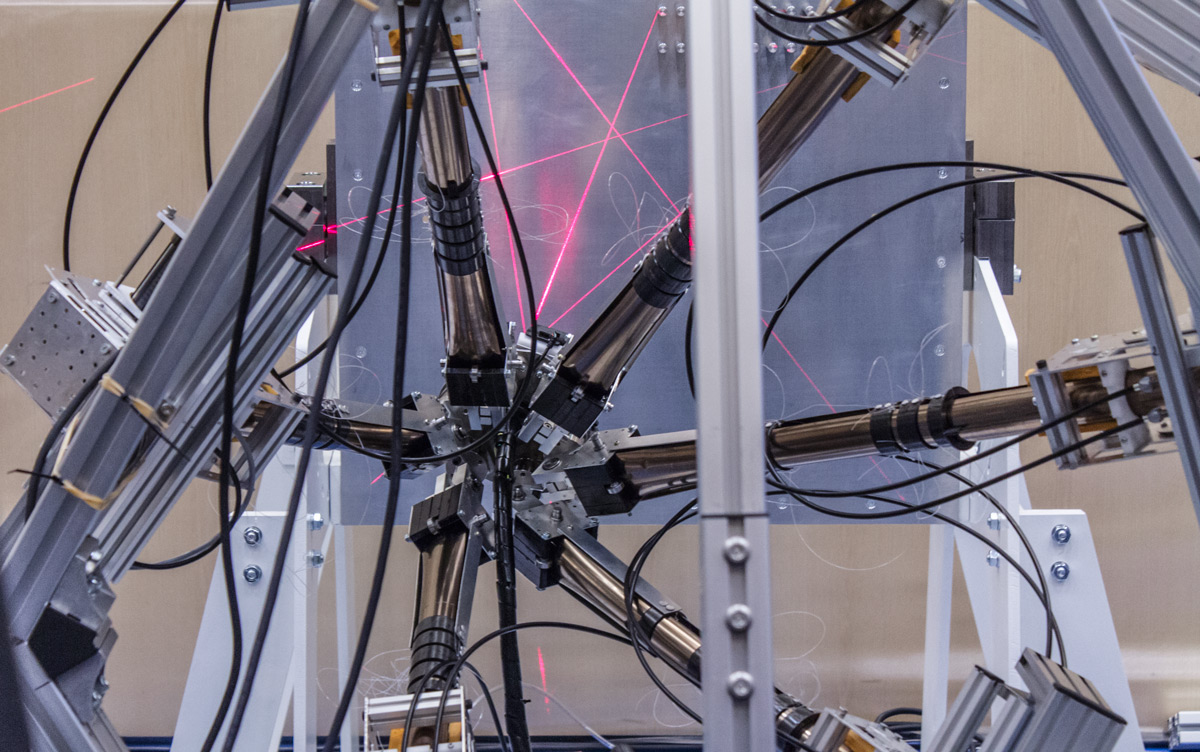
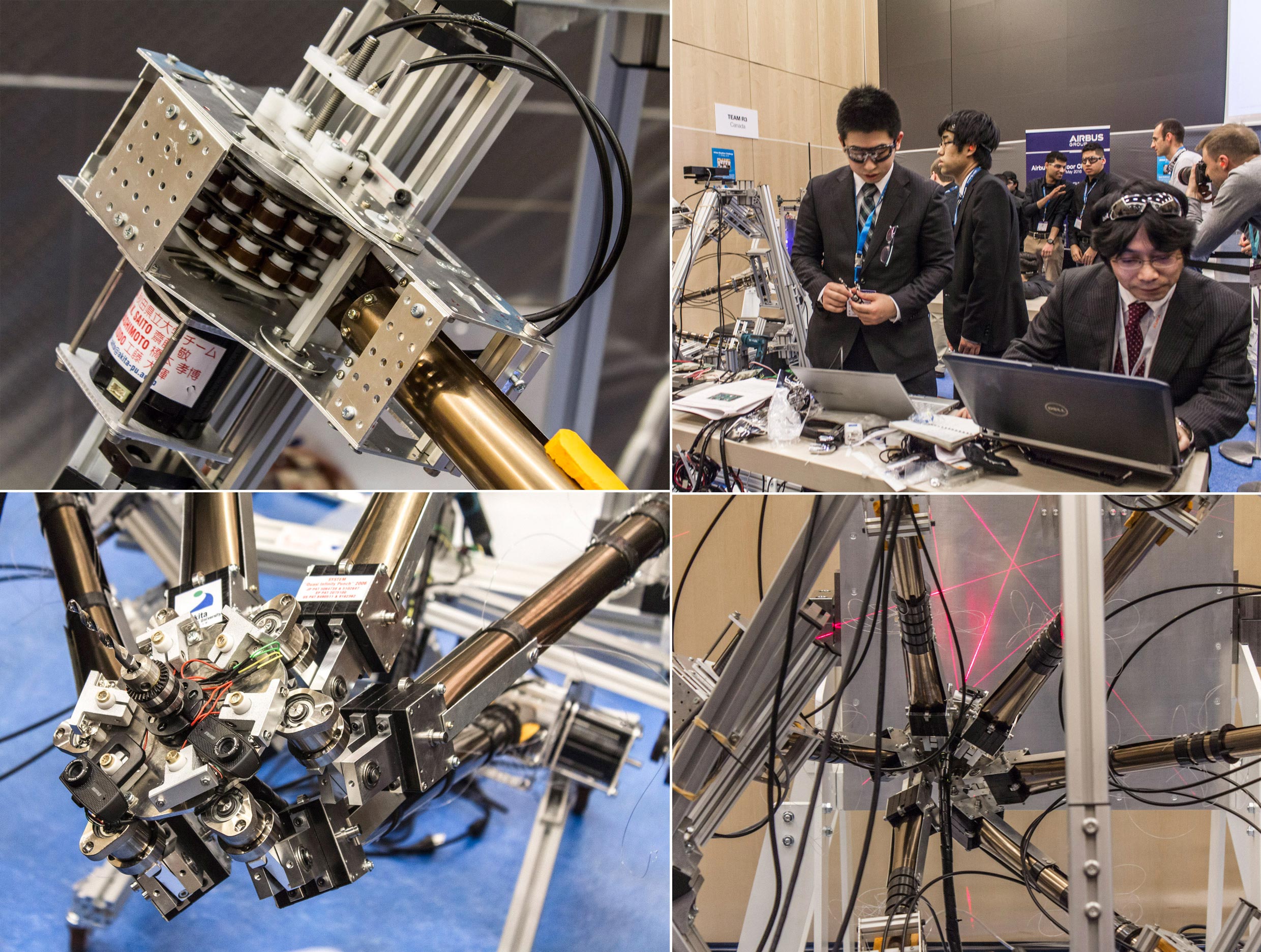
Team Akita Prefectural University
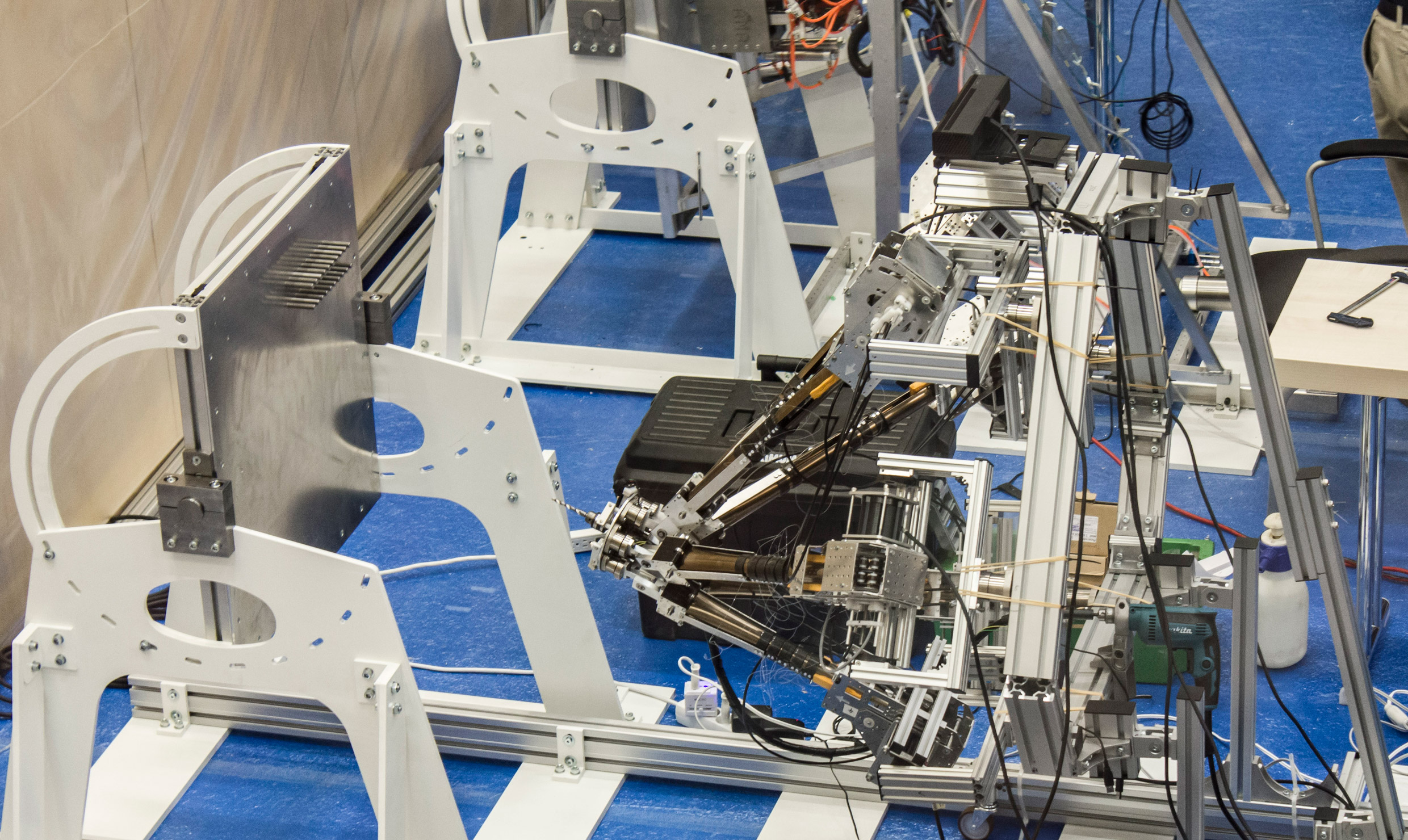
Japanese team Akita Prefectural University implemented a unique solution for the challenge. Their robot used a delta-based solution to place the drill bit accurately. The arms themselves used rolled metallic tape under restrictors to extend and contract. They were able to demonstrate their setup, but weren’t able to compete.
Team Bug Eaters
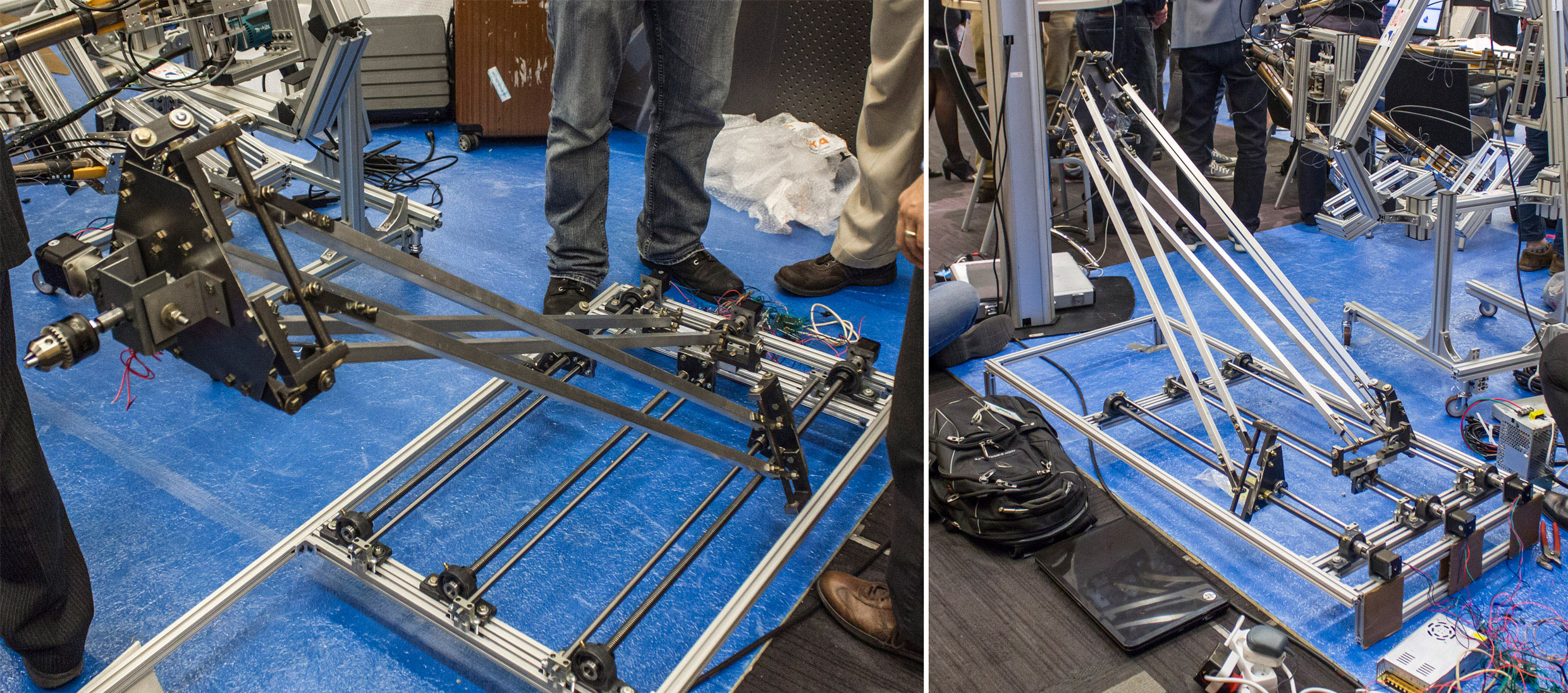
The Bug Eaters team from the University of Nebraska-Lincoln, USA is made up of four undergraduate Mechanical and Materials Engineering students. Their robot is an innovative version of the delta robot, but issues with their motors didn’t allow them to perform.
tags: Airbus, Airbus Shopfloor Challenge, c-Industrial-Automation, Competition-Challenge, Event, ICRA16

AUAI is supported by:









