
Robohub.org
Pros and cons for different types of drive selection

Different wheels for robots and rovers. Credit: CC0 public domain
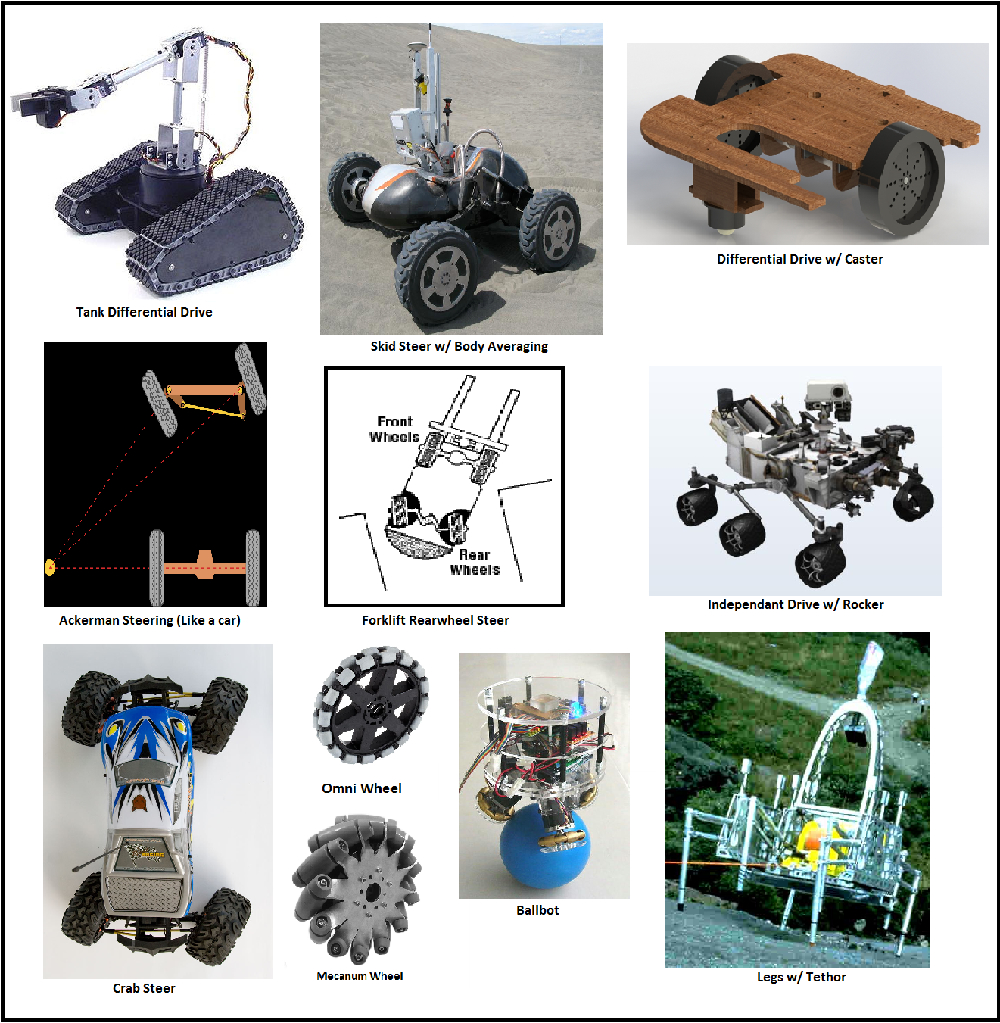
In the past, we have looked at wheel design and the kinematics of skid steer and mecanum wheels. In this post, we will take a quick look at different types of mobility types (ie. wheels, tracks) and how to connect them.
I know the items in this list are not direct comparisons. For example, listing rocker bogie is not necessarily exclusive to other types listed. Also, I know that you can design a vehicle to get around the pros and cons that I list below. The list is based on the common mechanical configurations.
For the purpose of this post:
- Holonomic motion: is where a vehicle can go in all X and Y directions and is not constrained.
- Non-holonomic motion: is where a vehicle is constrained to only certain motions. An example is a car that is not capable to drive sideways (with its ackerman steering). Don’t yell at me about the parallel parking magical cars. They are not the norm.
Source: Robots for Roboticists
| Type | Pros | Cons |
| Tracks (Differential Drive) | Good mobility for rough terrain, low ground pressure | Complex mechanism, high power usage when turning |
| Skid Steer 4 wheel | Very simple, high weight capacity | High power usage, requires skidding/slipping |
| Differential drive 2 wheel + Passive Caster(s) | Easy | Lower weight designs, less precise controls. bad for obstacles/bumps |
| 2 wheel + 1 Powered Steering Caster | Easy mechanical, powered steering wheel for control | Lower weight designs, potentially a lot of weight on steering wheel. |
| 2 wheel (Segway Drive) | Easy mechanical, fun! | Not dynamically stable |
| Ackerman Steering | Wheels do not need to slip to turn. Fixed rear wheels makes control geometry easier. | Increased motor count |
| Rear wheel forklift steering | Tight maneuverability, good if weight is on front wheels | Less responsive than ackerman, unstable at “high” speeds |
| Independent all wheel steering | Lot of flexibility for motion | Complexity of mechanism and large number of motors. More coordination needed for turns. |
| Rocker Bogie / Body Averaging | Helps body average the chassis to minimize pitch. Allows all wheels to maintain ground contact while distributing the weight. | Mechanical complexity |
| Omni | Non-holonomic, light, simple, Best performance when traveling diagonal, number of wheels can be varied | Motion can be bumpy, sensitive to nonsmooth terrain, low torque for pushing |
| Mecanum O* | Skid steer is possible, holonomic motions, can support heavy loads | Motion can be bumpy, very sensitive to nonsmooth terrain, can be noisy, lots of parts |
| Crab Steer | Allows 4 wheel drive vehicle to translate at an angles/horizontally (holonomic motion). Often wheels can all turn in for point turns. | All 4 wheels need to be actuated to spin and turn (often with 8 motors, but can be done with less). Can be unstable on hills. |
| Legs (2,4,6,etc..) | Ease of steeping over difficult terrain | Hard, complex, high power |
| Single Ball (Ballbot) | Small size base, highly maneuverable, can change robots orientation | Hard controls, not dynamically stable, good for taller robot and not wider robots |
| Inchworming** (Peristaltic Motion) | Increased drawbar and slope climbing due to utilizing static wheels/friction | Requires extra actuation, slower than typical motion, can be high power consumption |
*Mecanum X vs O configuration is based on how the wheels are mounted. With mecanum wheels the left and right side wheels are physically different. Looking from the bottom you want an O configuration. The X configuration does not allow rotation (without fighting the rollers).
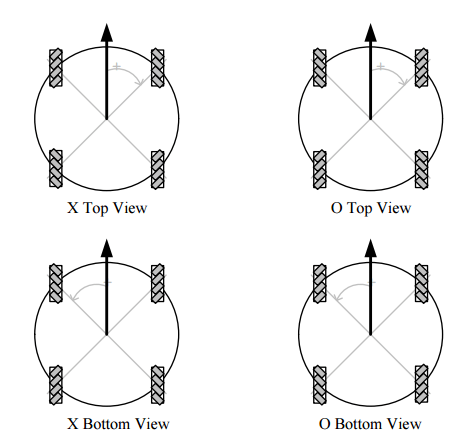
Mecanum wheel configurations. When viewed from the bottom the direction of the rollers form an X or an O shape.
** Basic description of inchworming. Inchworming moves one set of wheels at a time to utilize static friction for increased mobility.
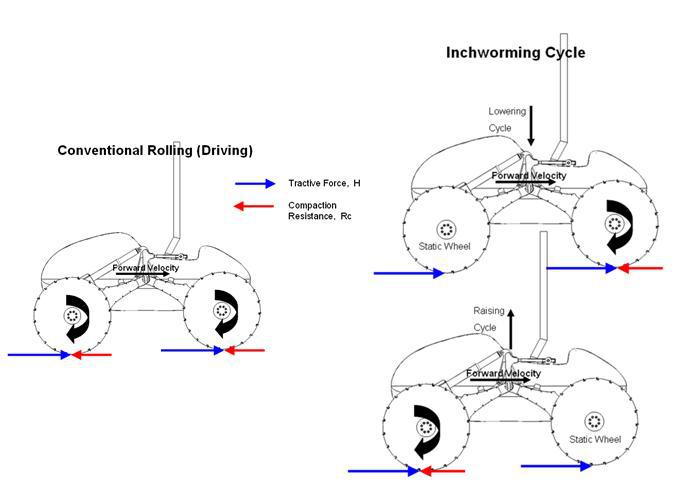
Inchworming image. Image on left shows standard driving. Images on right shows inchworming during each of the two stages of motion. The top image shows the robot lowering while moving the front wheel. The bottom image shows the robot raising up while pulling the rear wheel in.
First described here and further examined by others.
For more examples of unusual locomotion methods, visit unusuallocomotion.com.
Are there other mobility options that I should have included?
Drive Selection – Wheels, tracks and more appeared first on Robots For Roboticists.
tags: c-Education-DIY

AUAI is supported by:









