
Robohub.org
Robotics for Infectious Diseases Organization and other resources
In times of crisis, we all want to know where the robots are! And young roboticists just starting their careers, or simply thinking about robotics as a career, ask us ‘How can robotics help?’ and ‘What can I do to help?’. Cluster organizations like Silicon Valley Robotics can serve as connection points between industry and academia, between undergrads and experts, between startups and investors, which is why we rapidly organized a weekly discussion with experts about “COVID-19, robots and us” (video playlist).
During our online series, we heard from roboticists directly helping with all sorts of COVID-19 response, like Gui Cavalcanti of Open Source Medical Supplies and Alder Riley of Helpful Engineering. Both groups are great examples of the incredible power of people working together.
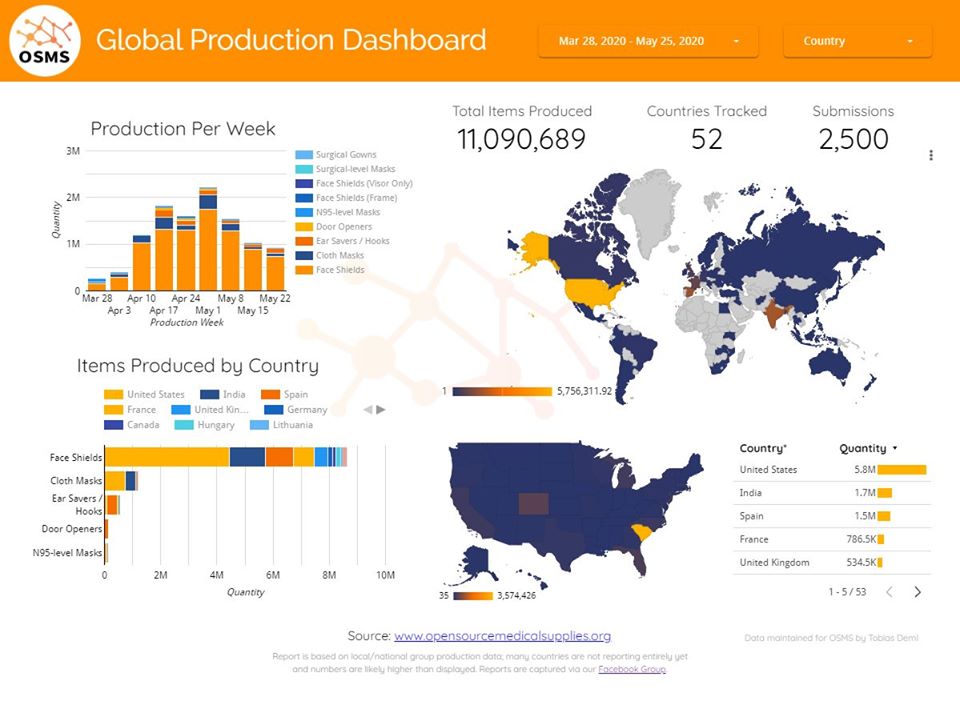
Open Source Medical Supplies (OSMS) was formed in March 2020 to research and disseminate open source plans for medical supplies used to treat and reduce the spread of COVID-19 that could be fabricated locally. Additionally, Open Source Medical Supplies supports, mentors, and guides local communities as they self-organize hospital systems, essential services, professional fabricators, makerspaces, and local governments into resilient, self-supporting supply units.
In its first two months of operation, Open Source Medical Supplies helped organize over 73,000 people in its Facebook group, produced 6 iterations of its Open Source COVID-19 Medical Supply Guide featuring 20 design categories and 90+ curated open source designs, engaged over 200 Local Response groups in 50 countries. OSMS materials are being translated into 40 languages, and OSMS guidance and collaboration platforms have catalyzed volunteers around the world to produce and deliver over 11 million medical supply items to their local communities (as of May 30).
Speakers like Mark Martin from California Community Colleges who started the Bay Area Manufacturers Discussion Forum and Rich Stump from Studio Fathom shared how the manufacturing community was coping with pivoting to making PPE instead of other products, and some of the issues with regulations and the supply chain.
Speakers like Tom Low and Roy Kornbluh from SRI International and Eric Bennett from Frontier Bio talked about redesigning ventilators, including designing robots to teleoperate ventilators. Ventilators are critical in treating COVID-19 but there is also a lack of trained operators, and FDA regulations don’t allow devices to be adapted or changed. And Rachel McCrafty Sadd (aka The Crafty Avenger) from Ace Monster Toys talked about making hundreds thousands of cloth masks and what sort of robots would have been useful.

In general, teleoperation is the trojan horse for adopting robots in workplaces in new ways. People trust a robot being remotely operated much more readily than a fully autonomous one. We spoke to Tra Vu from OhmniLabs and David Crawley of Ubiquity Robotics both of whom produce very affordable mobile bases for telepresence and other use cases, including disinfecting. The demand for both robots is rapidly increasing and people are asking for add-on abilities, like the ability to push a button, or open a door. Not all of these tasks are going to be simple to add but clearly once a hospital, facility or household has successfully used one robot, they are very willing to add more robots.

Rescue robotics expert Robin Murphy, who is Raytheon Professor of Computer Science and Engineering at Texas A&M, IEEE Fellow, ACM Fellow and Chair of the new Robotics for Infectious Diseases Organization joined us on several evenings to share a global tally of robot use cases around the world. Not only did the facts get the discussion going but she shared tips and tricks for how to design and deploy robots successfully in pandemic conditions.
Robotics for Infectious Diseases has launched two new interview series: Series 1 provides information from Public Health, Public Safety and Emergency Management Experts that answer many questions about what and how to deploy technology in a disaster response scenario (like COVID-19). The interviews are intended to give roboticists and robotics startups insights into the problems and requirements for technology in the health sector. Series 2 follows roboticists like Antonio Bicchi and Gangtie Zheng working on COVID-19 applications and describes the lessons learned.
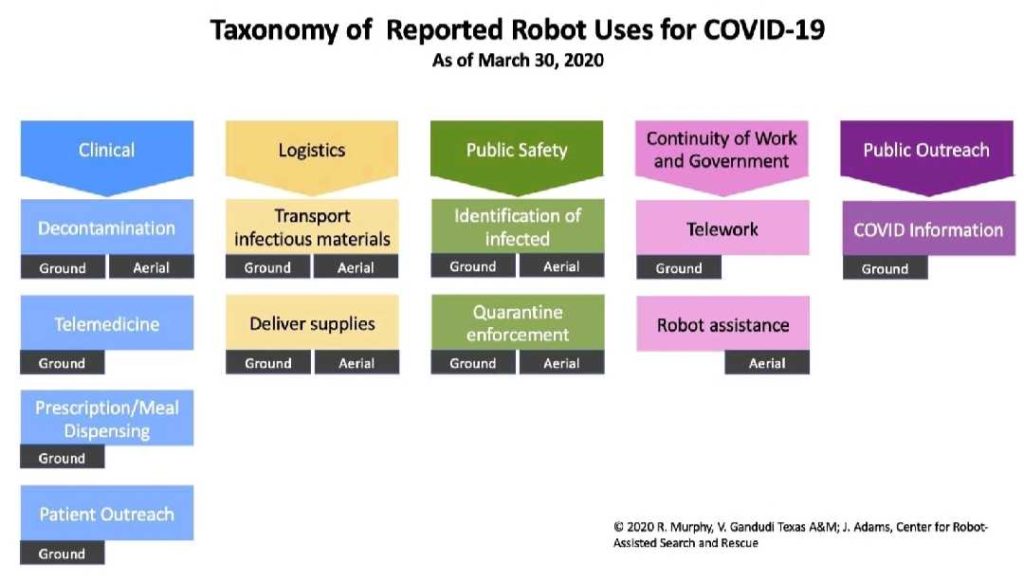
Figure from Robotics for Infectious Diseases Organization
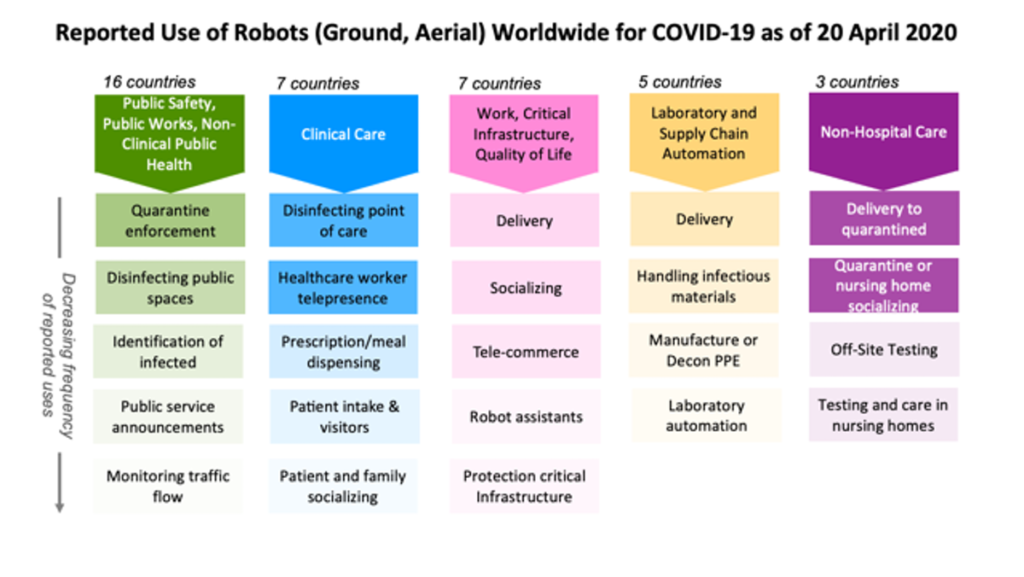
Figure from Robotics for Infectious Diseases Organization
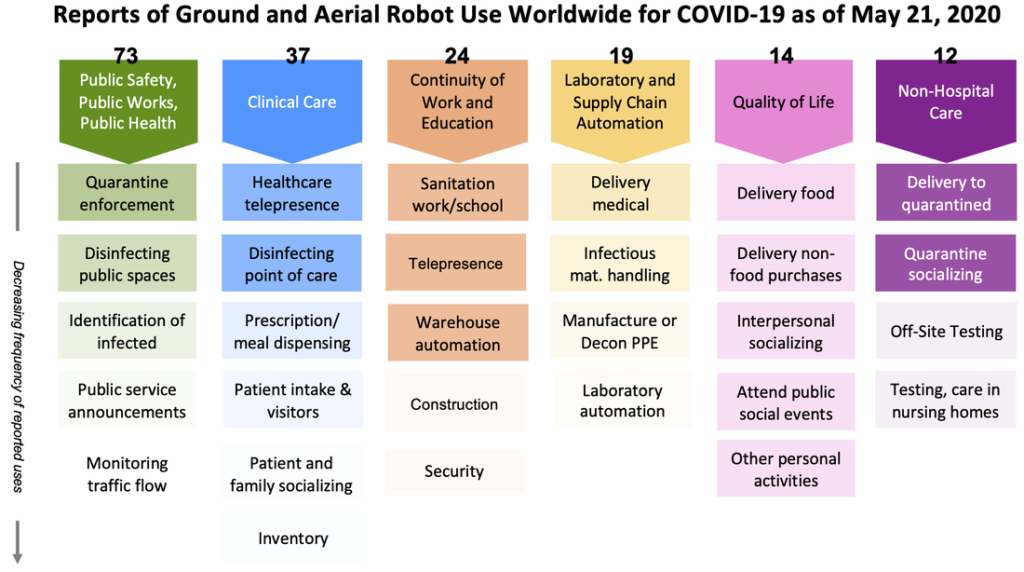
Figure from Robotics for Infectious Diseases Organization
Murphy’s primary research is in artificial intelligence for mobile robots as applied to disaster robotics. She has literally written the book about “Disaster Robotics”. Her analyses have shown that 50% of the terminal failures in disaster robotics are due to human error, so a significant portion of her work is in human-robot interaction. Murphy works with responders and agency stakeholders to determine gaps that lead to the formulation of applied and fundamental research thrusts with her non-profit Center for Robot-Assisted Search and Rescue (CRASAR). Her research group has participated in 27 disasters or incidents and over 35 exercises gathering data spanning urban search and rescue, structural inspection, hurricanes, flooding, mudslides, mine disasters, radiological events, and wilderness search and rescue.
In our COVID-19, robots and us series, we also heard from Sue Keay, the head of Australia’s robotics research cluster and organizer of the Australian Robotics Roadmap about some successful deployments for COVID response, and also disaster scenarios of other sorts, including their 4th place finish in the recent DARPA Subterranean Robotics Challenge.
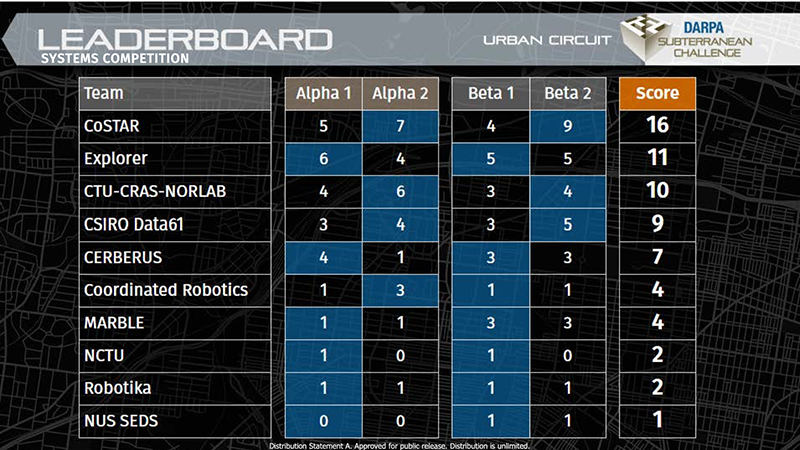
In the Systems competition of the Urban Circuit, 10 teams navigated two courses winding through an unfinished nuclear power plant in Elma, Washington, Feb. 18-27, 2020. DARPA designed the courses to represent complex urban underground infrastructure. The Virtual competition with eight teams took place Jan. 23-30, with results announced Feb. 27. Teams from eleven countries participated across the Virtual and Systems competitions in the Urban Circuit.
“Teams are under tremendous pressure in the SubT Challenge, not just because of the prize money at stake, but because of the significance of winning a DARPA Grand Challenge, events that have a history of jumpstarting innovation,” said Dr. Timothy Chung, program manager for the Subterranean Challenge in DARPA’s Tactical Technology Office. “At the core of the SubT Challenge is the mission to face an unknown environment and respond to changing situations.”
The focus turns now to the Cave Circuit, set for August 2020. DARPA will announce the location about three months prior to the start of the event. DARPA-funded and self-funded teams compete side-by-side throughout the Subterranean Challenge. Only self-funded teams are eligible for prizes in the Circuit Events, but they must finish in the top six overall for the Systems competition and top five overall for the Virtual competition. All qualified teams are eligible for prizes in the Final Event.
“We knew heading into the Urban Circuit that verticality would be one of the significant obstacles. Teams that traveled between floors, either flying, walking, or rolling, found more artifacts,” said Dr. Chung. “Teams designed their approaches to tackle uncertainty up front, and then toward the end of the Urban Circuit, we saw them put their platforms out there and take more risks, I look forward to seeing how they adapt for the Cave Circuit.”
Finally, if you have experiences to share deploying robots for COVID-19 applications, there is a Call for Papers for a Special Issue of IEEE RAM.
This special issue, edited by the IEEE RAS Special Interest Group on Humanitarian Technologies (SIGHT), aims to present up-to-date results and innovative advanced solutions on how robotics and automation technologies are used to fight the outbreak, giving particular emphasis to works involving the actual deployments of robots with meaningful analysis and lessons learned for the robotics community. The editors will accept both conventional full length contributions and short contributions reporting practical solutions to the problem that have proven effective in the field. The topics of interest for paper submissions include, but are not limited to:
- autonomous or teleoperated robots for hospital disinfection and disinfection of public spaces.
- telehealth and physical human-robot interaction systems enabling healthcare workers to remotely diagnose and treat patients.
- hospital and laboratory supply chain robots for handling and transportation of samples and contaminated materials.
- robots use by public safety and public health departments for quarantine enforcement and public service announcements.
- social robots for families interacting with patients or with relatives in nursing homes.
- robots enabling or assisting humans to return to work or companies to continue to function.
- case studies of experimental use of robots in the COVID-19 pandemic.
Important Dates:
May 2020 – Call for papers
31 July 2020 – Submission deadline
15 September 2020 – First decisions on manuscripts
30 October 2020 – Resubmission
30 November 2020 – Final decisions
10 December 2020 – Final manuscripts uploaded
March 2021 – Publication
Click here for more details.

AUAI is supported by:









