
Robohub.org
RoMi-H: Bringing robot traffic control to healthcare
Imagine for a moment that a road is used only for a single car and driver. Everything is smooth and wonderful. Then you wake up from that utopian dream and remember that our road networks have multiple cars of varying sizes, from different manufacturers, each with a driver with unique behaviors behind the wheel. We quickly realize that traffic conventions and rules are in place to avoid complete and utter chaos. We believe with increasing robotic use cases in the public domain as we all do see, a similar parallel reality needs to be realized and we propose that RoMi-H, an open-source robot and infrastructure framework that simplifies cross fleet robot collaboration, is the way to achieve this coming reality!
Even before the onset of COVID-19, the number of robots and automation technologies introduced and tested in the healthcare industry has been skyrocketing. Service robots perform an ever increasing and diverse set of tasks; taking on smaller and more sensitive deliveries in some cases and relying more heavily on shared infrastructure such as elevators (lifts), doors, and passageways. No single robotics or automation provider can supply the breadth of solutions required in a modern healthcare facility and no facility can afford to operate siloed systems requiring dedicated infrastructure and operating unique user interfaces. Therein lies the challenge.

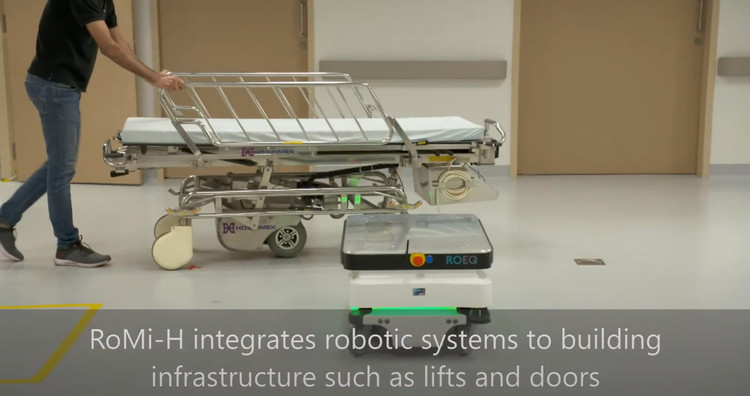
ROMI-H allows robots from different vendors to interact with each other as well physical assets in the hospital like elevators. The robots can even avoid gurneys and people.
First announced in July 2018, Robotic Middleware for Healthcare (RoMi-H) is a unique open-source system built on ROS 2 and simulated using the Gazebo simulator. It allows for uniform communication and monitoring across robot platforms, sensors, and enterprise information systems. A brief explanation of this initiative can be found in WIRED Magazine: As Robots Fill the Workplace, They Must Learn to Get Along. In tomorrow’s reality, interoperability must be front and center for every developer, manufacturer, systems integrator, and end-user.
As we have written before:
We need food-delivery robots from one vendor to communicate with drug-delivery robots from another vendor. We need a unified approach to command and control for all the robots in a facility. We need a reliable way to develop and test multi-vendor systems in software simulation prior to deployment. And for it to succeed we need this critical interoperability infrastructure to be open source.
Under the leadership of Singapore’s Centre for Healthcare Assistive and Robotics Technology (CHART) and with collaborators such as IHiS, Hope Technik, GovTech and other solution providers, Open Robotics has been working since 2018 to develop an open-source software solution. Its goal is to realize the potential of a vendor agnostic and interoperable communication system for heterogeneous robots, sensors, and information systems in the healthcare space. To accelerate its development we are encouraging contributions to the open-source codebase to accelerate the development of a robust and sustainable system.

RVIZ Shows each robot’s planned path as well as keep out areas for other robots with ROMI-H
In order to understand the underlying mechanics of RoMi-H, we encourage you to take a look at Programming Multiple Robots with ROS 2. It is being continuously updated and will provide you with a thorough explanation of ROS 2 — upon which RoMi-H is built — and the core Robotics Middleware Framework (RMF) that serves to power RoMi-H. The book also features a tutorial on how one might build a web application that can interface with RoMi-H to create useful applications for robot operators or user-facing tools for the robotics industry.
RoMi-H is able to apply the same software across the different robotic systems while ROS 2 manages the communication and data routing from machine to machine; allowing for real-time, dependable and high-performance data exchanges via a publish-subscribe pattern. Publishers group their messages into different classes and subscribers receive information from the classes of messages they have indicated an interest in. This allows RMF to provide a common platform for integrating heterogeneous robotic systems.
We see the RoMi-H project as a significant step, encouraging an open and integrated approach to robotics development and digitising healthcare. We are looking forward to receiving feedback and contributions from interested parties.

RMF can take a simple map and translate it into a Gazebo simulation. The entire system is powered by ROS 2.
Learn More
A public webinar that introduced RMF and featured a live demonstration took place on 18 August 2020 in the CHART Lab. The presentations and recordings can be viewed here. At the same time, if you are interested in finding out more and viewing the source code, do check out the ROS 2 book and the following repositories:
ROS 2 Book:
Github Repositories:
- RMF: https://github.com/osrf/rmf_core
- Traffic Editor: https://github.com/osrf/traffic_editor
- Free Fleet Management: https://github.com/osrf/free_fleet
- Demo Worlds: https://github.com/osrf/rmf_demos
We would like to acknowledge the Singapore government for their vision and support to start this ambitious research and development project, “Development of Standardised Robotics Middleware Framework – RMF detailed design and common services, large-scale virtual test farm infrastructure, and simulation modelling”. The project is supported by the Ministry of Health (MOH) and the National Robotics Program (NRP).
Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not reflect the views of the NR2PO, MOH or other parties.
tags: c-Research-Innovation, cx-Health-Medicine, open source

AUAI is supported by:









