
Robohub.org
The 400lb CHIMP in the room: CMU’s Tartan Rescue Team prepares for the DRC
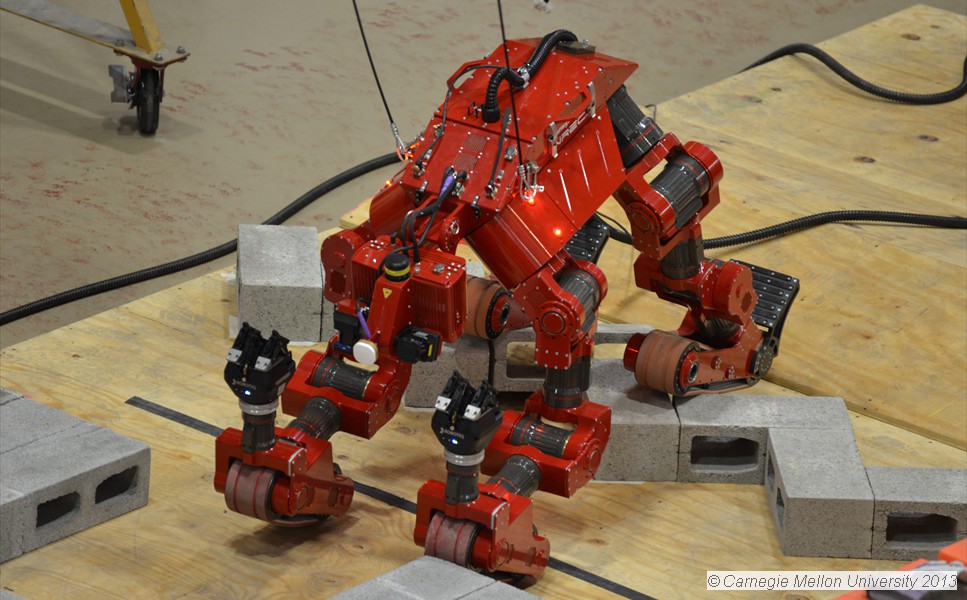 Carnegie Mellon University’s Tartan Rescue Team has completed assembly of its 400 pound 5-foot-2 inch tall simian-like robot that will compete in the first annual DARPA Robotics Challenge (DRC) in Homestead, FL from December 20 to the 21st. The DRC, motivated by the Fukushima Daiichi nuclear disaster is a push to develop technology to allow people and robots to work together in environments too dangerous for humans. Success of the technology will make robots more robust to both natural and man-made disasters and mitigate effects in first hours when disaster is still happening.
Carnegie Mellon University’s Tartan Rescue Team has completed assembly of its 400 pound 5-foot-2 inch tall simian-like robot that will compete in the first annual DARPA Robotics Challenge (DRC) in Homestead, FL from December 20 to the 21st. The DRC, motivated by the Fukushima Daiichi nuclear disaster is a push to develop technology to allow people and robots to work together in environments too dangerous for humans. Success of the technology will make robots more robust to both natural and man-made disasters and mitigate effects in first hours when disaster is still happening.
CHIMP – CMU Highly Intelligent Mobile Platform – is one of 17 robots participating in the challenge. The four-limbed robot has a wingspan of almost 10 feet and is designed to navigate on tank treads affixed to each limb. For tasks that require use of its arms such as climbing a ladder or operating power tools, CHIMP can stand on its leg tread. CHIMP also uses 360 degree sensing using a pair of laser rangefinder mounted to its head to visualize and map its surroundings, which a remote operator can use to analyze the disaster site.
In a recent press release, Tony Stentz, NREC director and leader of the Tartan Rescue Team said he has high hopes for the competition: “We’ve been on a fast track for the past year, doing detailed design and development of CHIMP at the same time as we were writing and testing its software on surrogate hardware. That’s an aggressive approach to producing a robot unlike any we have built and not without risk, but it appears to be paying off.”
And when it comes to his team’s readiness for the competition: “Even though we would love to have more time to practice with CHIMP prior to the trials, we’ve been pleased so far with its performance.”
The competition comes with high stakes – only eight of the seventeen teams will receive future DARPA funding to help prepare for the DRC finals next December. All of the tasks in the competition require an extremely high level of mobility and dexterity by the robots. Some of these tasks include: driving a utility vehicle, going up a wall and cutting a hole, and opening and closing valves. If CMU’s performance in the 2004, 2005 and 2007 DARPA Grand Challenge and Urban Challenge serves any indication, this year’s Tartan Rescue Team will be a strong contender for one of those eight spots. We will still have to wait to observe the long-term effects of the DRC on the robotics industry. Will it be just another exhibition of expensive robotic gadgetry or will it expedite the commercialization of rescue robots as the DARPA Grand and Urban Challenges did for self-driving vehicles?
tags: c-Events, Competition-Challenge, cx-Military-Defense, cx-Research-Innovation, DARPA, DRC
AUAI is supported by:









