
Robohub.org
The Year of CoCoRo Video #28/52: All magnet finding
 The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development. This video shows the robots finding magnetic targets.
The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development. This video shows the robots finding magnetic targets.
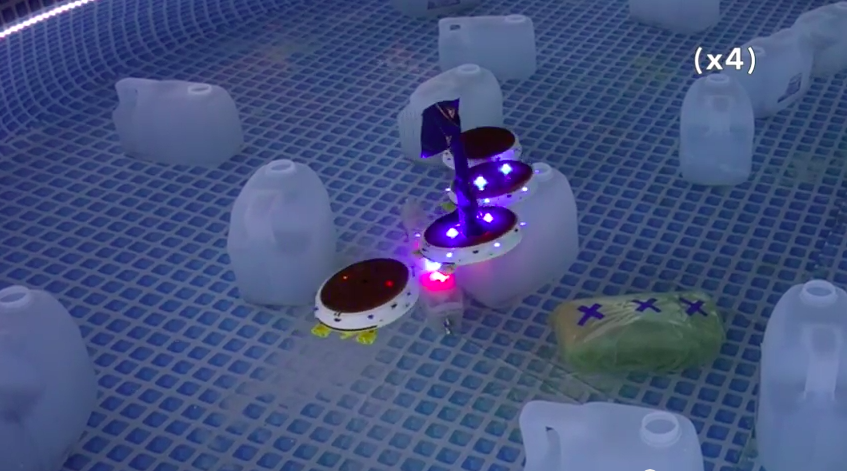
A heterogeneous swarm of Lily robots, Jeff robots and a surrogate for a surface station were used for this experiment. The search target was again a magnetic target in a fragmented habitat. The Jeff robot first autonomously searches for the target, stops when it’s located and switches on its vertical blue-light and red LEDs. This attracts Lily robots browsing near the surface. They stop and recruit other Lily robots with their horizontal blue-light LEDs. This attracts even more Lily robots and establishes a positive feedback loop – a growing aggregation of robots. Ultimately, all the Lily robots aggregate at the target spot, together with the one that emulates the surface station.
tags: AUV, c-Research-Innovation, CoCoRo, EU, EU robotics industry news, Swarming, UAV, underwater video



