
Robohub.org
The Year of CoCoRo Video #31/52: Combined scenario number one – base station arrival
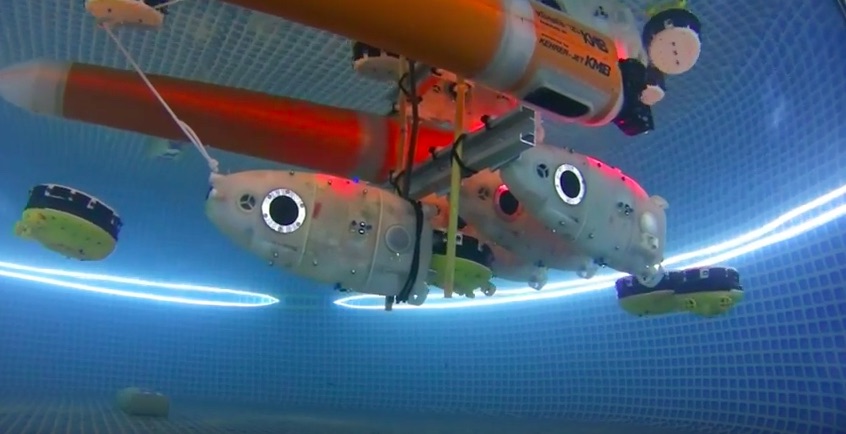 The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development. This week, in our “combined scenario #1,” the CoCoRo system as a whole enters the habitat.
The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development. This week, in our “combined scenario #1,” the CoCoRo system as a whole enters the habitat.
Following this event, the only human intervention in the execution of the scenario ocurrs: a button pressed by a human operator sends a WLAN signal and the swarm is released. For this very important security measure, we purposely kept the human in the loop, because a robot swarm is just a tool that a human operator, who is responsible for it, can use to achieve or facilitate a certain task. After the release of the swarm, the Jeff robots sink to the base of the pool and begin their search for the metallic/magnetic target object. Meanwhile, the Lily robots swarm out to build the “relay chain” between the target spot and the surface station.
tags: AUV, c-Research-Innovation, CoCoRo, EU, EU robotics industry news, Swarming, UAV, underwater video



