
Robohub.org
The Year of CoCoRo Video #33/52: Combined scenario number one – relay chain
 The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development. This week, we show several instances of a relay chain, in the middle phase of our “combined scenario #1”
The EU-funded Collective Cognitive Robotics (CoCoRo) project has built a swarm of 41 autonomous underwater vehicles (AVs) that show collective cognition. Throughout 2015 – The Year of CoCoRo – we’ll be uploading a new weekly video detailing the latest stage in its development. This week, we show several instances of a relay chain, in the middle phase of our “combined scenario #1”
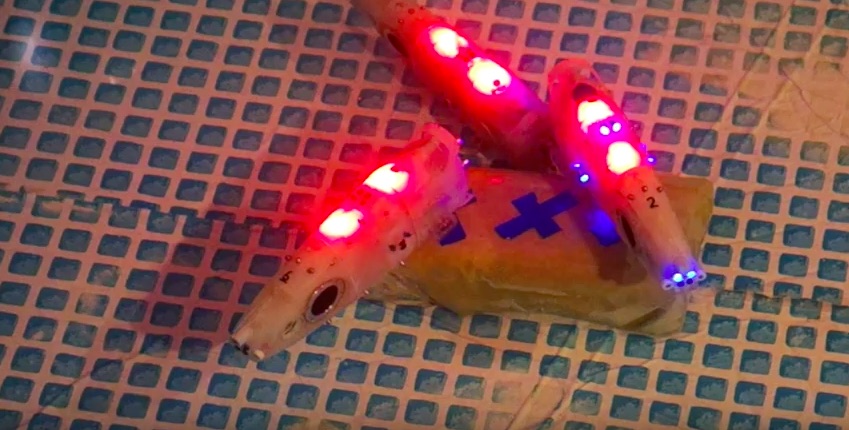
In the CoCoRo system there is often a large gap between the swarm of Jeff robots on the ground, that have found a search target, and the base station at the water surface. Underwater communication is often difficult and limited so, to bridge this gap, a swarm of Lily robots build a chain, which we call a “relay chain.” It allows the ground swarm and the surface station to communicate with each other through light pulses, RF or electric pulses. In this scenario we test information transfer in both directions by triggering either the ground swarm or the base station with a flashlight pulse.
The relay chain is formed by Lily robots executing a special “shoaling algorithm.” Inspired by fish shoaling behavior, It is based on their reactions to their nearest neighbors sensed passively by photodiodes on the outer hull of the Lily robots. Reception of periodic blue-light blinks allows the robots to detect each other and to align and orient themselves relative to their neighbors’ configuration. Thus, the relay chain formation itself is almost communication-free, as the photodiodes and blinks can be easily replaced by a video camera and object detection. The only actual communication is the relaying of RF pulse information, based on the strategy used by slime-mould amoebas.
tags: AUV, c-Research-Innovation, CoCoRo, EU, EU robotics industry news, Swarming, UAV, underwater video



