
Robohub.org
Crowdsourcing new strategies for cancer treatment: Towards swarming nanobots
NanoDoc is our new online game to crowdsource the design of nanomedicine.
The game allows bioengineers and the general public to imagine new nanoparticle strategies towards the treatment of cancer. It uses a simulator to predict how nanoparticles behave in tumors, and is based on years of research at the laboratory of Sangeeta Bhatia at MIT. The challenge is to design nanoparticles that interact with each other and their environment in a way that leads to better treatment outcomes.
The first levels of the game are used to train new NanoDocs; licensed NanoDocs are then given challenges to solve. We hope the drive to help fight cancer and learn about nanomedicine will empower the crowd to discover original, creative and efficient nanoparticle strategies that we haven’t thought of in the lab. Our ultimate goal is to discover ways in which nanoparticles can cooperate, or swarm, like self-organized systems in nature. Best strategies will be considered for validation in the lab or using robotic swarms.
Nanoparticles
Cancer causes one in every four deaths in the USA. To treat cancer, bioengineers have designed nanoparticles that can deliver drugs and diagnostics directly to tumors. After injection, typical chemotherapies tend to seep out of the blood stream throughout the body. The drugs are then free to attack all the cells encountered – even healthy ones – thereby causing side effects. By comparison, nanoparticles are slightly bigger than drugs, around 5 to 500 nanometers (or around 100 to 10’000 times smaller than a human hair). This special size allows them to leak out of the large pores in tumor vessels and yet still be contained in the blood stream throughout the rest of the body. As a result, nanoparticles can passively accumulate in tumors while avoiding healthy tissue (EPR effect).
Nanoparticles come in different sizes, shapes and materials. They can be loaded with drugs that are released in a controlled fashion, and coated with molecules that allow them to interact with their environment. Some of these molecules can serve as a signature to uniquely identify cancer cells. Upon binding, cells can engulf nanoparticles that then deliver their cargo intracellularly. Nanoparticles can also be made of energy-receptive materials that heat up upon magnetic or laser excitation.
Embodied Intelligence
There are many ways you can design a nanoparticle. Depending on your design, the nanoparticle will move, sense and act in different ways – just like a robot. Control is embedded in the design of the nanoparticles and their interactions with the environment rather than their computational capabilities. In other words, changing the body of the nanoparticle will change its behavior: that’s what we call embodied intelligence. The challenge is understanding which nanoparticle designs will improve treatment outcome. This is a difficult problem because trillions of nanoparticles typically interact in a tumor with millions of cells. Predicting and optimizing the emergent behavior of all these nanoparticles is guess work at best.
To simplify the problem, we’ve taken two steps. First, we designed a simulator that allows us to model how nanoparticles interact with each other and the tumor environment. The simulator is based on realistic values from scientific literature and is currently being used in our laboratory to help improve how we make nanoparticles for cancer treatment. Second, we zoom in to a representative area of the tumor instead of modeling the entire system. The hope is that if we chose the tumor section wisely, we will be able to generalize the results to the rest of the tumor. We’ve already used this setup to predict how well nanoparticles can penetrate into tumor tissue after they leave a vessel, and to design new nanoparticle strategies to improve cell death.
Swarm Control
Like our nanoparticles, flocks of birds, ant colonies, cells and robot collectives can exhibit seemingly complex swarm behaviors when large numbers of simple agents react to local information. By design, swarms are efficient, robust and scalable. Emergent swarm behaviors useful for real-world applications include amplification, optimization, mapping, structure assembly, collective motion, synchronization and decision making. Our goal now is to explore how nanoparticles can cooperate, or swarm, to synergistically improve their therapeutic effect.
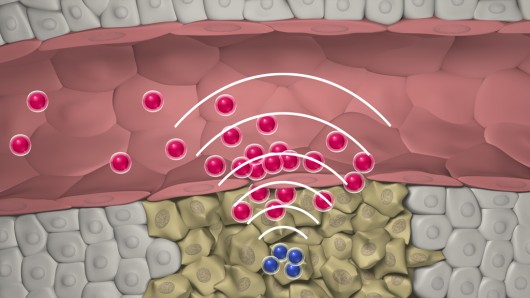
Recent work by our laboratory, which uses nanoparticles that communicate in vivo to amplify tumor-homing, shows promise in this direction (von Maltzahn et al., Nature Materials, 2011). In this work, gold nanoparticles (shown below in blue), would passively accumulate in the tumor. My colleagues would then heat the nanoparticles using a laser, thereby causing damage to the tumor tissue. The second wave of nanoparticles (shown below in red) were engineered to bind to the damaged tissue, and would therefore accumulate at higher numbers there. In a way, the nanoparticles were communicating through the environment.
Using our simulator, we’re now able to explore such nanoparticle swarm designs. In the video example below, simulated nanoparticles leaving a blood vessel (in red) must find a rare cell (with a pink border) in the tumor tissue. This rare cell could have a specific mutation, and its detection might help identify a pocket of cells resistant to treatment. By smartly engineering the nanoparticles and how they interact with their environment, we’re able to mark direct paths from the vessels to the cell. Similar to ants forming trails to your picnic table, these nanoparticles work by depositing and interacting with information in the environment.
http://youtu.be/MH4UAPdoZxg
Crowdsourcing
There are many such tumor scenarios and swarm strategies. Each one takes time to explore and requires large amounts of trial and error and human intuition. Furthermore, each problem is different, making it difficult to program a computer that can automatically design the nanoparticles. Instead, we’ve decided to make our simulator available through Nanodoc: an online game we developed for crowdsourcing the design of nanomedicine. Bioengineers can design their own tumor scenarios and submit them to the crowd. People like you can then come in and design different nanoparticle strategies, and test them using our scientific simulator. Our hope is that, together, we will discover unthought-of swarm strategies for novel medical applications.
Validation
In parallel to our simulator, we’ve been working on ways to translate your designs to reality. This will require expert bioengineers to imagine real nanoparticles. Select nanotreatments discovered using NanoDoc will be validated using 1) in vitro tissue-on-a-chip constructs that we have designed to emulate the extravasation of functionalized nanoparticles from artificial vessels into a compartment containing tumor cells and 2) robotic swarm systems (kilobots) in collaboration with Radhika Nagpal’s lab from the Wyss Institute at Harvard University.

Finally, thank you to all those who have been helping us develop NanoDoc over the last two years including Radhika Nagpal’s lab, Eric Klopfer’s lab, Srini Devadas’ lab and the Human Frontier Science Program. We presented the first NanoDoc prototype at IROS last fall and have been working hard to integrate your feedback since then.
Ready to be a NanoDoc ? Let us know about your questions below.
tags: c-Research-Innovation, cx-Health-Medicine, Swarming

AUAI is supported by:









