
Robohub.org
Fish and ships: artificial lily pads and mussels monitor Europe’s waters
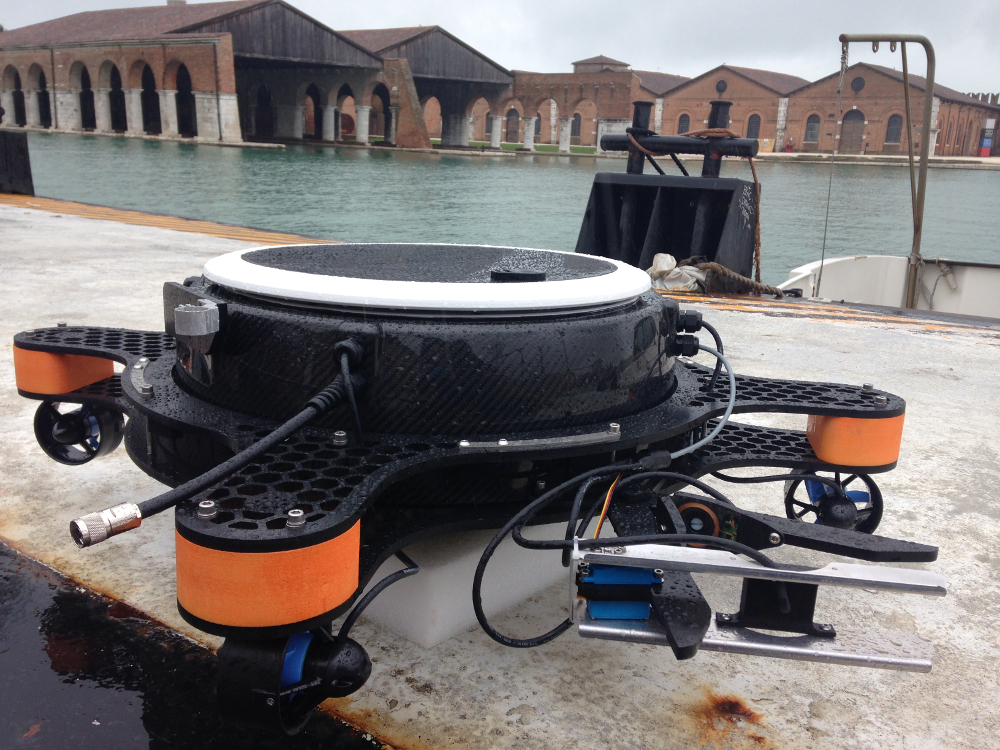
Artificial lily pads store solar energy and collect information such as shipping routes for robotic fish and mussels below the water’s surface. Image courtesy: subCULTron
by Fintan Burke
Europe’s waters have never been busier. Between fishing boats, tourist cruisers, and underwater turbines, marine habitats around the continent have never before needed a more watchful eye.
To improve the monitoring of these waters, researchers are recreating the ecology and unique senses of marine life.
The subCULTron project is creating a network of autonomous robots which occupy the roles of a lily pad, a fish, and a mussel respectively.
The project uses ‘swarm’ technology, where a group of robots communicate with each other to build up a comprehensive picture of the environment without relying on a single source of information.
‘If you lose 20 % of your swarm robots, it means 80 % of your swarm is still collecting data and is still doing some work,’ said project leader Dr Thomas Schmickl of the University of Graz, Austria. ‘If you lose your one field robot, then game over.’
On the surface, autonomous lily pad robots, known as aPads, use their large area to host solar power cells on their surface. ‘This is like an energy recharging unit we have,’ said Dr Schmickl.
As well as providing energy, the aPads also receive information from the outside world, such as shipping routes. This allows the other robots to be fully aware of their environment.
Beneath the surface, aFish robots are designed to swim like regular fish to monitor water quality and marine life. ‘They are information carriers and they are also seeking for new information, and when they meet each other they can exchange information,’ said Dr Schmickl.
The aFish also have electrodes on their surface which project an electric field around themselves. Any particle entering this field will distort it, which is ‘sensed’ by the robot to provide information about the surrounding area.
Lastly, aMussels on the ocean floor serve as the long-term memory of the ecosystem, storing data as well as sampling some sediment.
‘They can be woken up by the aFish as soon as they get close by and then the aFish can store information in this mussel, can retrieve information from this mussel and use this mussel as a sort of communication platform,’ said Dr Schmickl.
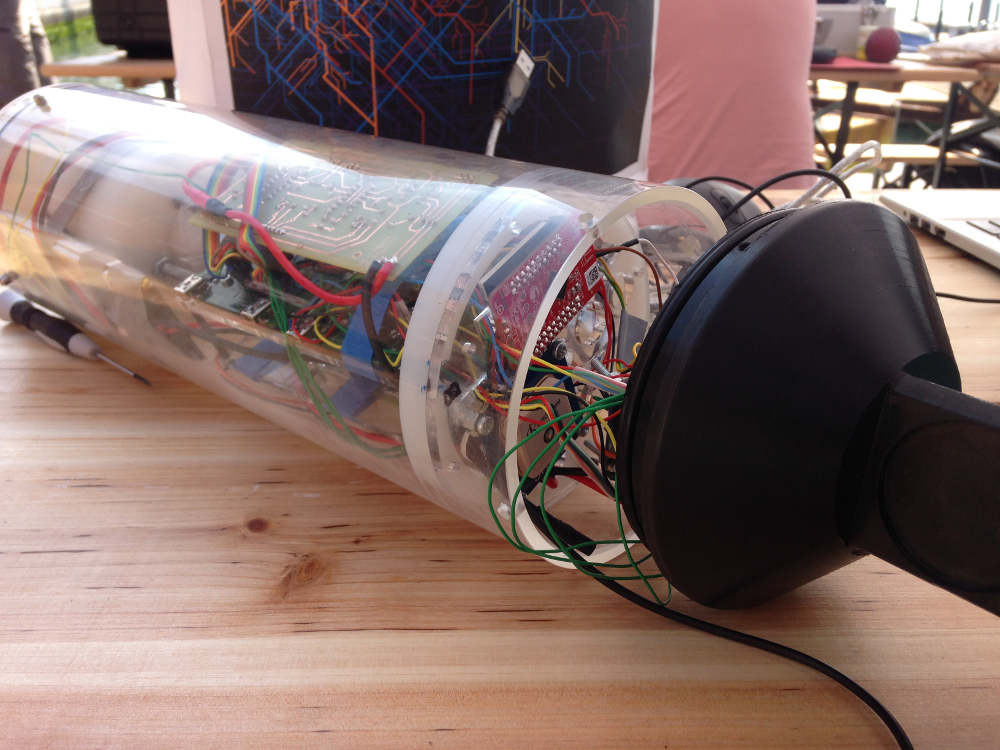
Researchers made a robotic mussel to collect information on the ocean’s floor. Image courtesy: subCULTron
One emphasis of the project was to ensure that the system survives on its own for as long as possible. Dr Schmickl hopes the robots will achieve a high level of interaction to keep the system dynamic and self-sustaining.
‘The aMussel will surface so it will go up to the surface, call for an aPad, and the aPad will go there and charge this aMussel and then maybe also displace the aMussel to a more favoured place,’ he said.
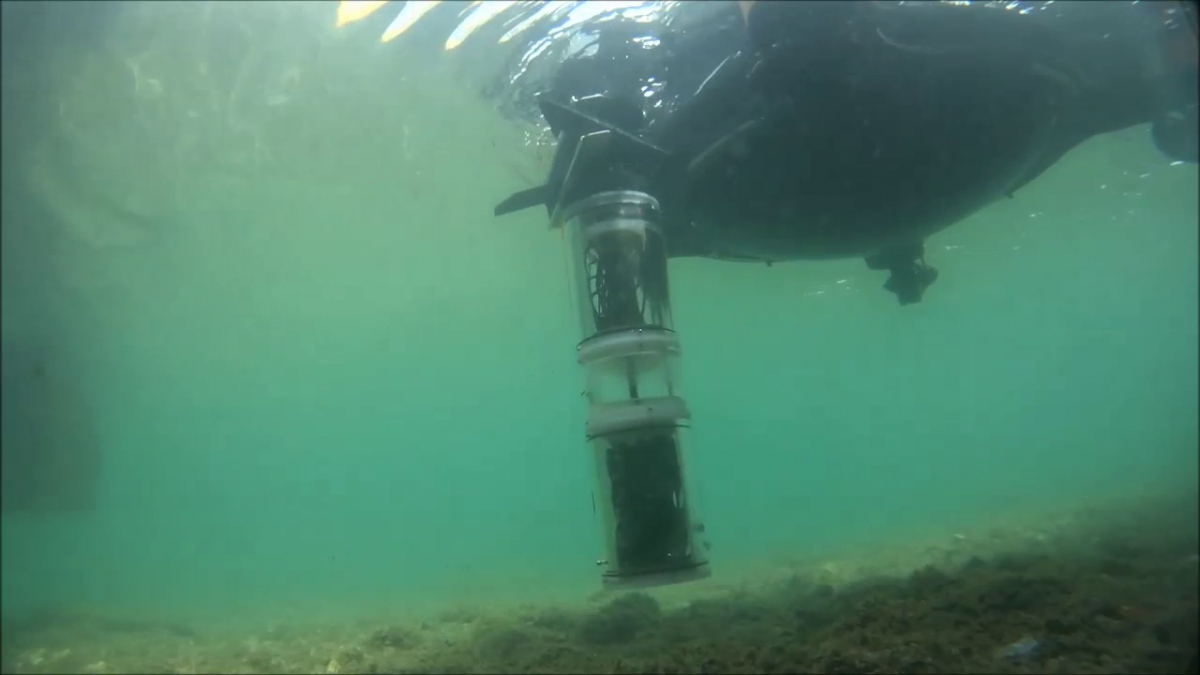
The robotic mussel floats up and docks in the artifical lily pad to charge. Image courtesy: subCULTron
Following on from successful lab trials in a previous project, the team is conducting field trials in Venice, Italy, to see if the robots can survive in a natural environment.
‘This is a really out-of-the-lab condition and to our knowledge a (fully autonomous) swarm robotic application has never been released to the wild,’ said Dr Schmickl.
Lateral line
Another project, LAkHsMI, uses another unique type of bio-inspired technology to monitor the ocean. Marine vertebrates have what is called a lateral line – sense organs that detect movements and vibrations in the surrounding water.
According to Professor Maarja Kruusmaa of the Tallinn University of Technology, Estonia, many researchers have tried to replicate this bio-inspired technology before, though nobody has attempted it at the scale her team is developing.
The Issue
Maritime surveillance is an integral part of the EU’s Blue Growth strategy as it helps to give policymakers the knowledge they need to support the so-called blue economy around Europe’s coastal areas.
The blue economy represents roughly 5.4 million jobs and generates a gross added value of almost EUR 500 billion a year.
The idea is to develop sectors that have potential for sustainable jobs and growth such as aquaculture, coastal tourism, marine biotechnology,ocean energy and seabed mining.
‘We want to build a gigantic artificial lateral line, something that could sense flow on an area, for example, a 10-kilometre-long line or at least a 100-metre-long line,’ she said.
The sensor uses fibre optic technology throughout the cable in order to detect changes in velocities deep underwater. When the cable is bent due to underwater forces, the light running throughout the cable changes intensity. Researchers measure this intensity change to detect what is going on under the water.
‘The advantage of this technology is that it doesn’t need to have a power source at the spot of sensing, because it just transmits light from the shore and you receive the light from the shore,’ explained Prof. Kruusmaa.
Using these cables to measure the lower levels of the ocean will also provide new information to oceanographers.
‘If you could put a cable across the strait you could understand how the bottom layers of water are flowing,’ she said. ‘Now if you match it with a satellite imagery you get a more complex understanding of the whole circulation in the ocean.’
For now, the LAkHsMI team are continuing to develop their prototype at the lab scale, with the later aim of testing the sensor at sites in both Estonia and Orkney, UK.
One potential application, says Prof. Kruusmaa, is checking how much of the ocean’s energy can be captured by underwater turbines. ‘One thing with renewables, what you really want to know, is how much energy of the ocean does it use and how much (the turbine) disturbs (the) environment’ she said.
tags: cx-Research-Innovation, swarm robotics

AUAI is supported by:









