
Robohub.org
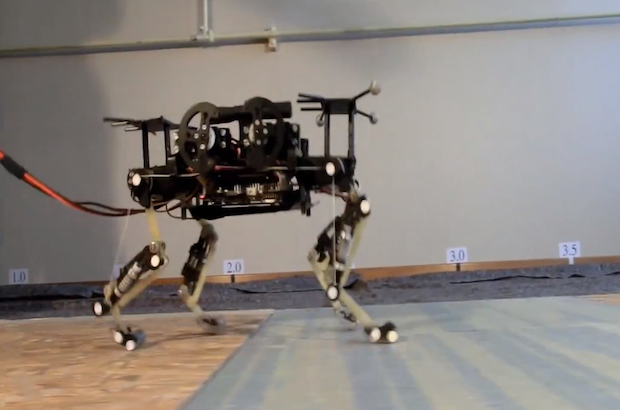
Quadruped robot ‘cheetah’ learns to walk using animal gait patterns | IEEE Spectrum
This work shows that it’s possible to derive gait primitives from motion-capture of an actual animal and adapt them to a robot.
Read more: IEEE Spectrum
tags: EPFL, quadruped, walking robot

Hallie Siegel
robotics editor-at-large
Hallie Siegel
robotics editor-at-large
Related posts :
Robot Talk Episode 89 – Simone Schuerle
In the latest episode of the Robot Talk podcast, Claire chatted to Simone Schuerle from ETH Zürich all about microrobots, medicine and science.
14 June 2024, by
Robot Talk
Robot Talk Episode 88 – Lord Ara Darzi
In the latest episode of the Robot Talk podcast, Claire chatted to Lord Ara Darzi from Imperial College London all about robotic surgery - past, present and future.
07 June 2024, by
Robot Talk
Robot Talk Episode 87 – Isabelle Ormerod
In the latest episode of the Robot Talk podcast, Claire chatted to Isabelle Ormerod from the University of Bristol all about human-centred design and women in robotics.
31 May 2024, by
Robot Talk
Robot Talk Episode 86 – Mario Di Castro
In the latest episode of the Robot Talk podcast, Claire chatted to Mario Di Castro from CERN all about robotic inspection and maintenance in hazardous environments.
24 May 2024, by
Robot Talk
Congratulations to the #ICRA2024 best paper winners
The winners and finalists in the different categories have been announced.
20 May 2024, by
AIhub
Robot Talk Episode 85 – Margarita Chli
In the latest episode of the Robot Talk podcast, Claire chatted to Margarita Chli from the University of Cyprus all about vision, navigation, and small aerial drones.
17 May 2024, by
Robot Talk


