
Robohub.org
Entangled robotic matter with cohesive motion
By Syl Kacapyr
Cornell engineers have developed a robotic collective that behaves less like a machine and more like a material that flows, reshapes and adapts to its environment without centralized control.
The system, called the Cross-Link Collective, consists of dozens of small robots that have limited mobility individually, but together exhibit coordinated and sustained motion. The research, published May 20 in Science Robotics, demonstrates a robotic system that resembles soft matter, continuously deforming and reorganizing as it moves, driven by what researchers call mechanical intelligence.
“Instead of relying on explicit computation and communication, the system shifts the intelligence into the shape of the robots and their physical interactions,” said corresponding author Kirstin Petersen, associate professor of electrical and computer engineering and the Aref and Manon Lahham Faculty Fellow in the Cornell Duffield College of Engineering. “We’re leveraging the contact dynamics to let useful behaviors emerge, so the system naturally settles into configurations that reduce internal stresses and improve motion.”
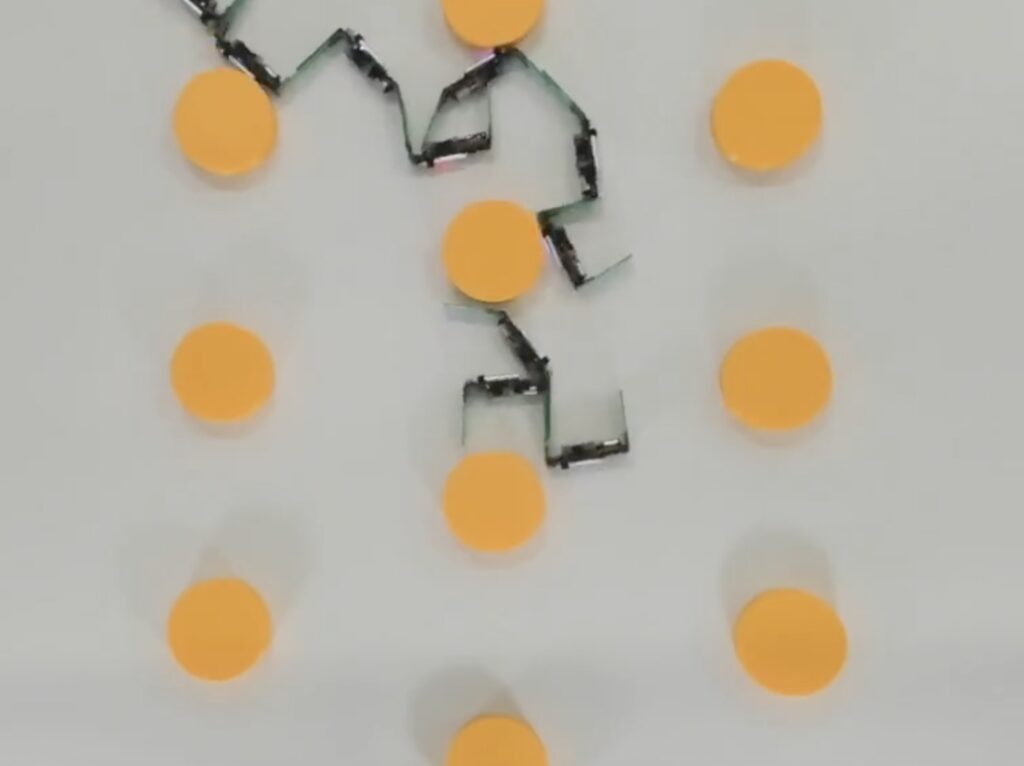
Each robotic module measures about 200 millimeters in length and 20 millimeters in width, and contains a small motor that drives it to oscillate between two shapes, an “I” and a “U.” These oscillations generate forces against the ground, allowing the modules to inch forward and jostle into one another. At each end of the module are weak Velcro patches, enabling them to temporarily latch and unlatch onto neighboring modules.
On their own, the modules move slowly and inefficiently. But when they entangle into chains, they begin to move collectively, self-organizing into shifting configurations that prove resilient in challenging environments.
On incline surfaces, chains of robotic modules moved more reliably than individuals, which often stalled depending on their orientation. In obstacle fields, the collective behaved like a flowing material in which connections formed to maintain cohesion, then broke apart to prevent jamming.
“It doesn’t matter if one module has a compromised battery or fails for other reasons,” said lead author Danna Ma, visiting lecturer in electrical and computer engineering. “The system stays functional because it can adapt. It is redundant and doesn’t depend on any single module.”
Despite the minimal approach, the researchers showed that even a small amount of computation can improve system properties. To enhance cohesion, isolated modules emit an audible distress signal, prompting nearby modules to slow down and allow the straggler to reconnect.
“There is no centralized sensing or control,” Ma said. “Each module can infer when it has lost contact with the group by how much it’s being jostled and then use an audible buzz to slow down nearby modules while it catches up. It’s as simple as that.”
Co-authors at the Georgia Institute of Technology developed the original design of the module, which Petersen and Ma refined over years of experimentation and statistical analysis to improve its ability to entangle and operate in large numbers. That process revealed how even subtle changes in module size and other characteristics can influence how effectively they connect and move as a group.
The Cross-Link Collective draws inspiration from active gels – materials whose molecular links continually form and dissolve while maintaining overall structure. The findings could help inspire new forms of soft-matter engineering, though the researchers mostly see the system as a tool for studying how mechanical intelligence can give rise to resilient emergent behaviors in robot collectives.
“It’s helpful for us to start thinking about what we can encode into the physics of a system itself, as robots are increasingly applied to real-world scenarios that are highly unreliable and dynamic,” Petersen said. “Counterintuitively, by giving up exact control over configurations and coordination, we gain a surprising range of useful behaviors.”
AUAI is supported by:









