
Robohub.org
Wall-climbing robots create a carbon fiber hammock (with video, images)

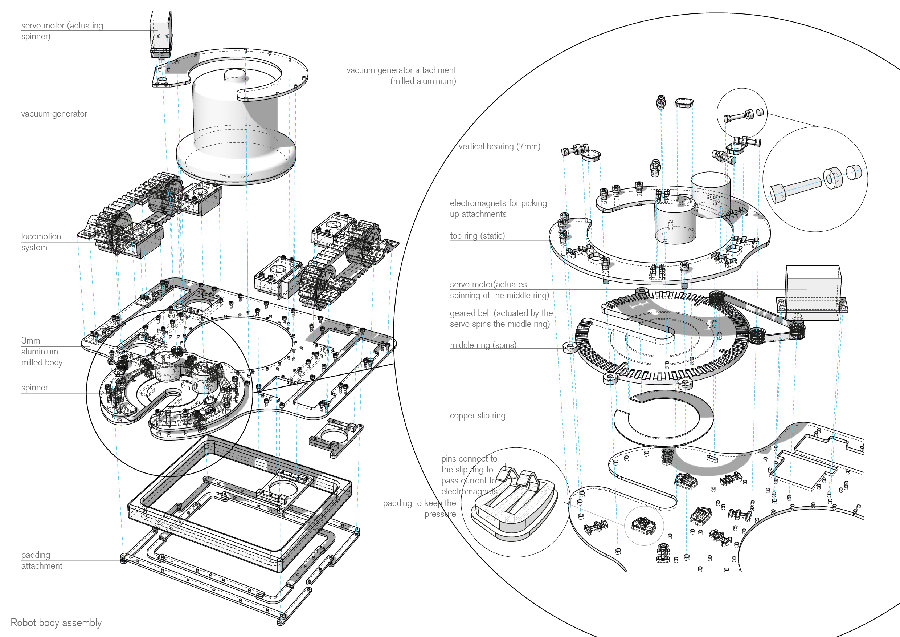
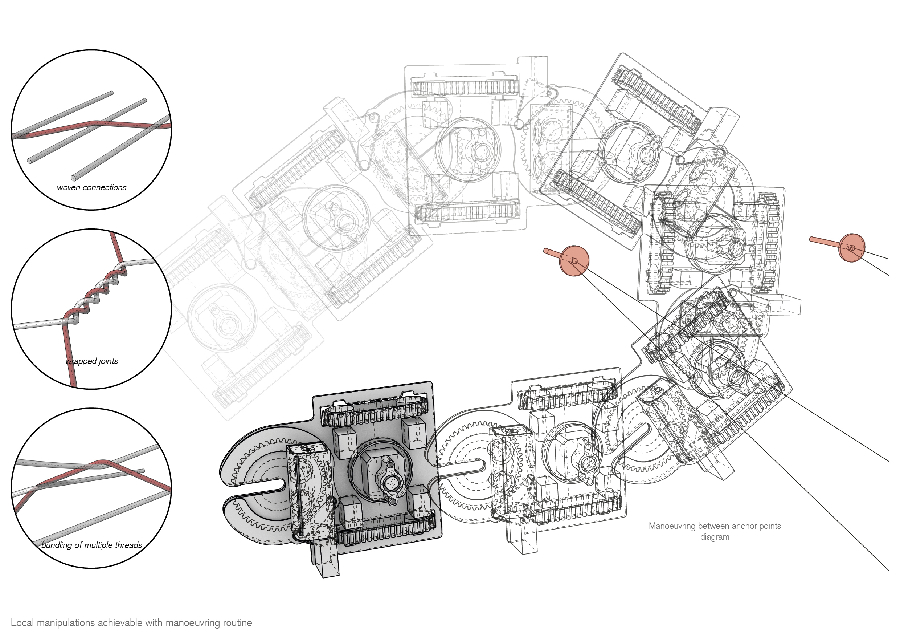
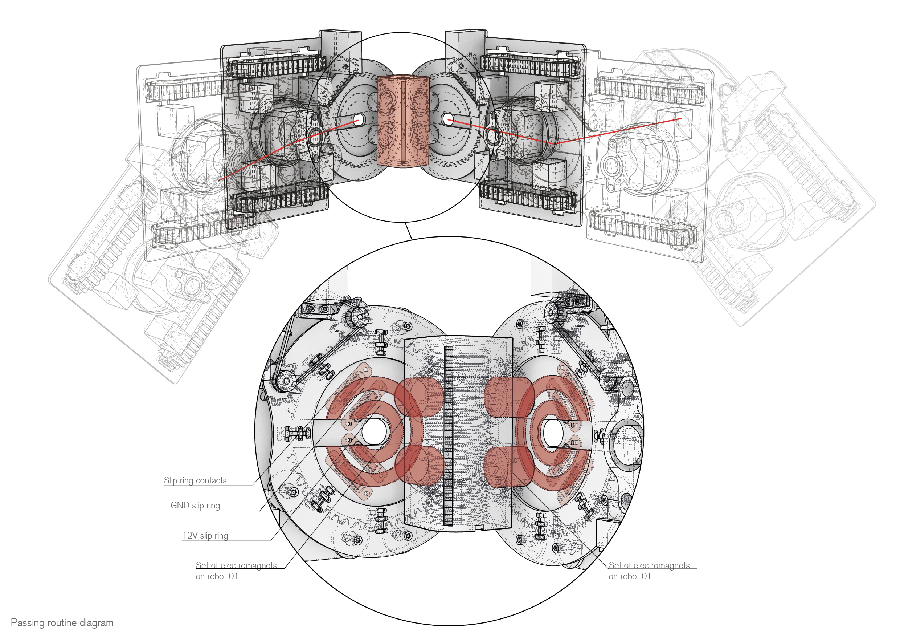
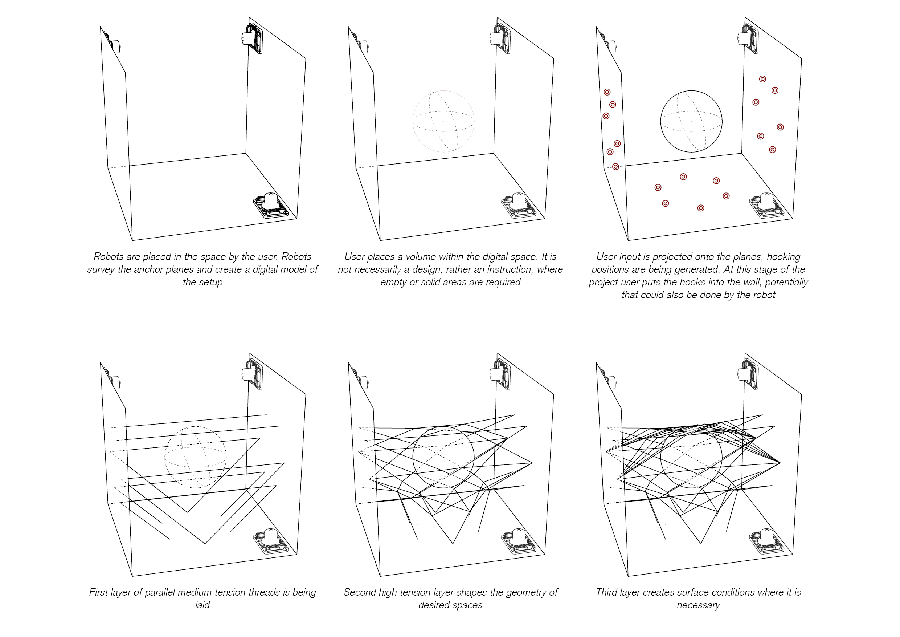
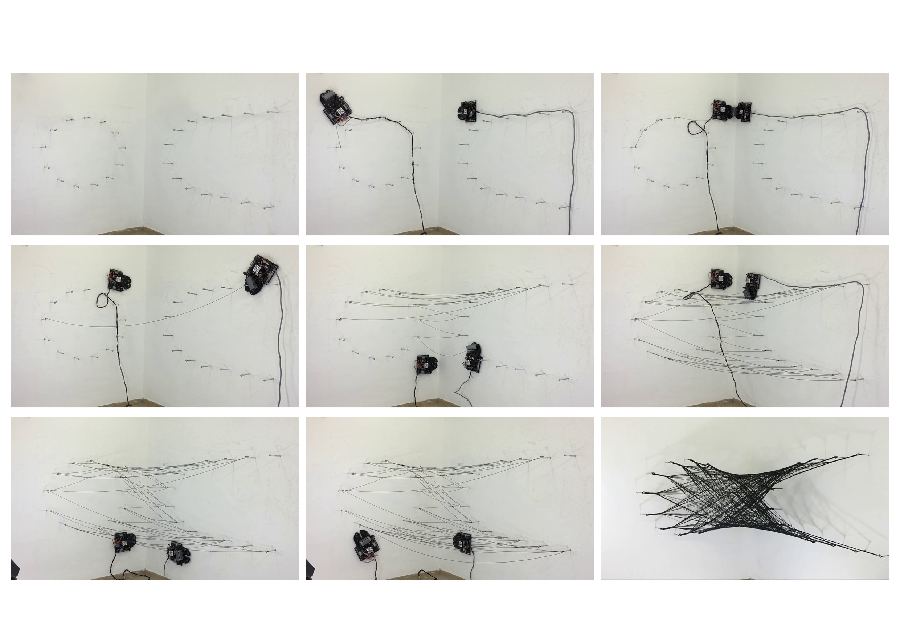
Maria Yablonina’s project, called Mobile Robotic Fabrication System for Filament Structures, demonstrates a new production process for filament structures, like carbon fiber, by crawling up the wall and spinning structures. The robots look remarkably similar to spiders spinning silk.
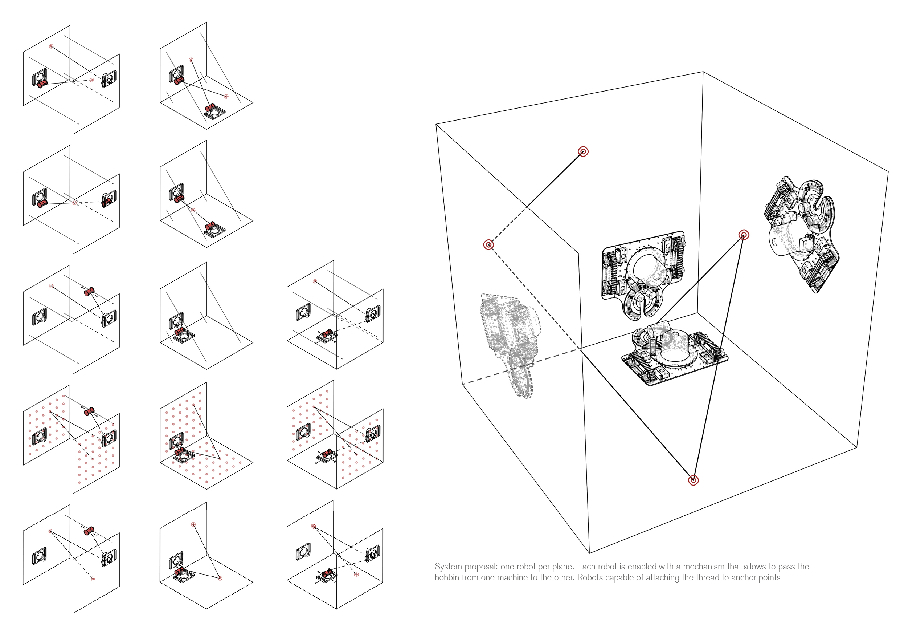
From the project website: “It proposes multiple semi-autonomous wall climbing robots to distribute fiber filament, using any horizontal or vertical surface, or even existing architecture, to support the new structures. Compared to larger scale industrial robots that are limited by position and reach, these robots are enabled with movement systems and a collection of sensors that allow them to travel and interact accurately along typical ground, walls, roofs, and ceilings.
One can imagine a fabrication process where an operator arrives at the scene with a suitcase housing all the necessary robots and materials to create a large structure. These agile mobile robotic systems move robotic fabrication processes beyond the constraints of the production hall, exposing vast urban and interior environments as potential fabrication sites.”
All images credit Maria Yablonina, University of Stuttgart
Project by: Maria Yablonina, MSc.
Thesis Advisers: E. Baharlou, M. Prado, T. Schwinn
Thesis Supervisor: Prof. Achim Menges
Second Supervisor: Prof. Jan Knippers


tags: c-Education-DIY

AUAI is supported by:









