
Robohub.org
A soft matter computer for soft robots
 Our work published recently in Science Robotics describes a new form of computer, ideally suited to controlling soft robots. Our Soft Matter Computer (SMC) is inspired by the way information is encoded and transmitted in the vascular system.
Our work published recently in Science Robotics describes a new form of computer, ideally suited to controlling soft robots. Our Soft Matter Computer (SMC) is inspired by the way information is encoded and transmitted in the vascular system.
Soft robotics has exploded in popularity over the last decade. In part, this is because robots made with soft materials can easily adapt and conform to their environment. This makes soft robots particularly suited to tasks that require a delicate touch, such as handling fragile materials or operating close to the (human) body.
However, until now, most soft robotic systems have been controlled by conventional electronics, made from hard materials such as silicon. This means putting stiff components into an otherwise soft system, limiting its overall flexibility. Our SMC instead uses only flexible materials, allowing soft robots to retain the many benefits of softness. Here’s how it works.
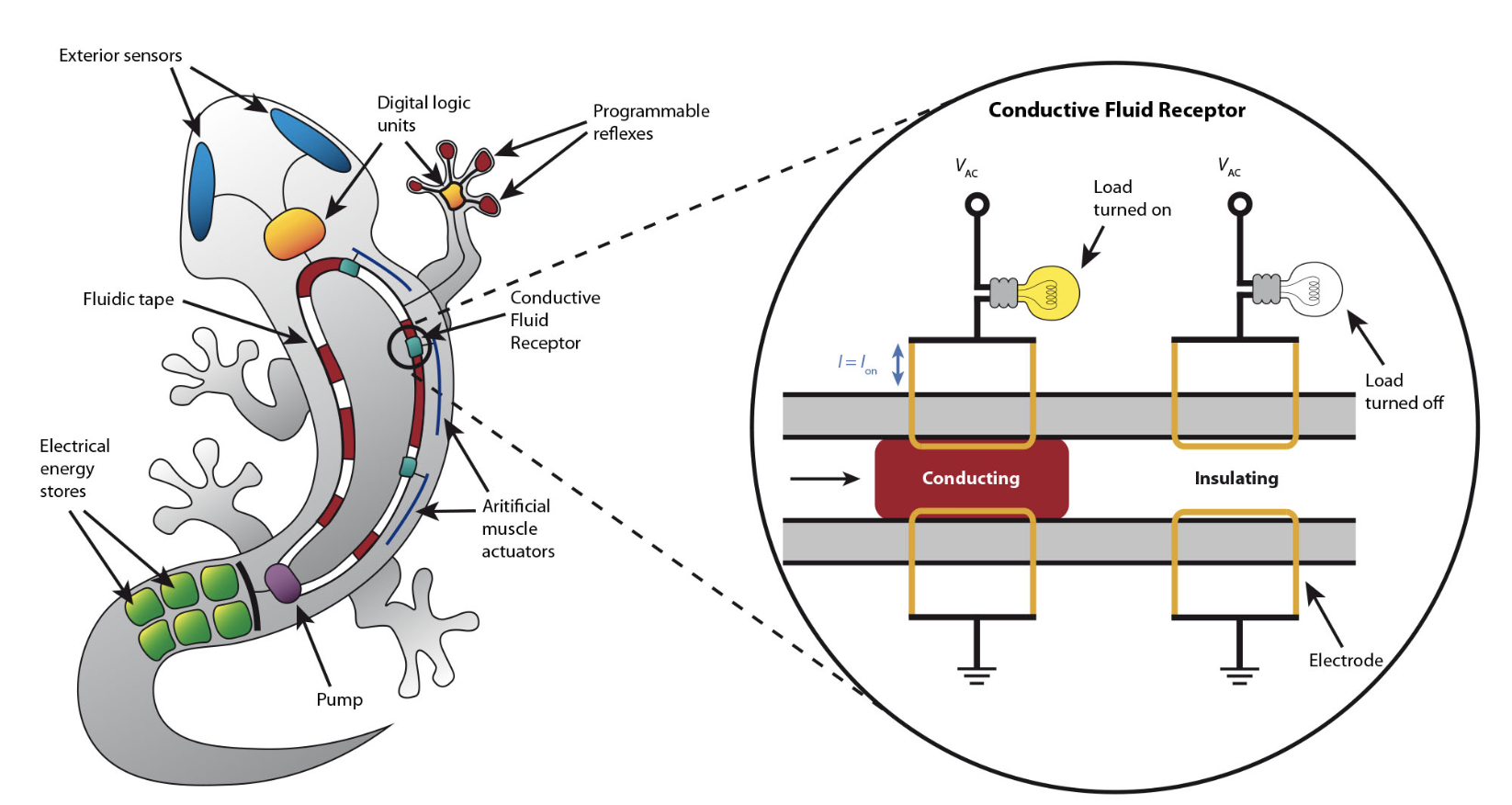
The building block of our soft matter computer is the conductive fluid receptor (CFR). A CFR consists of two electrodes, placed on opposite sides of a soft tube, parallel to the direction of fluid flow. We inject a pattern of insulating (air, clear) and conducting (saltwater, red) fluids into the CFR. When the saltwater connects the two electrodes, the CFR is switched on. By connecting a soft actuator to a CFR, we have a simple control system.
By connecting multiple CFRs together, we can create SMCs that perform more complex calculations. In our paper, we show SMC architectures for performing both analogue and digital computation. This means that in theory, SMCs could be used to implement any algorithm used on an electronic computer.
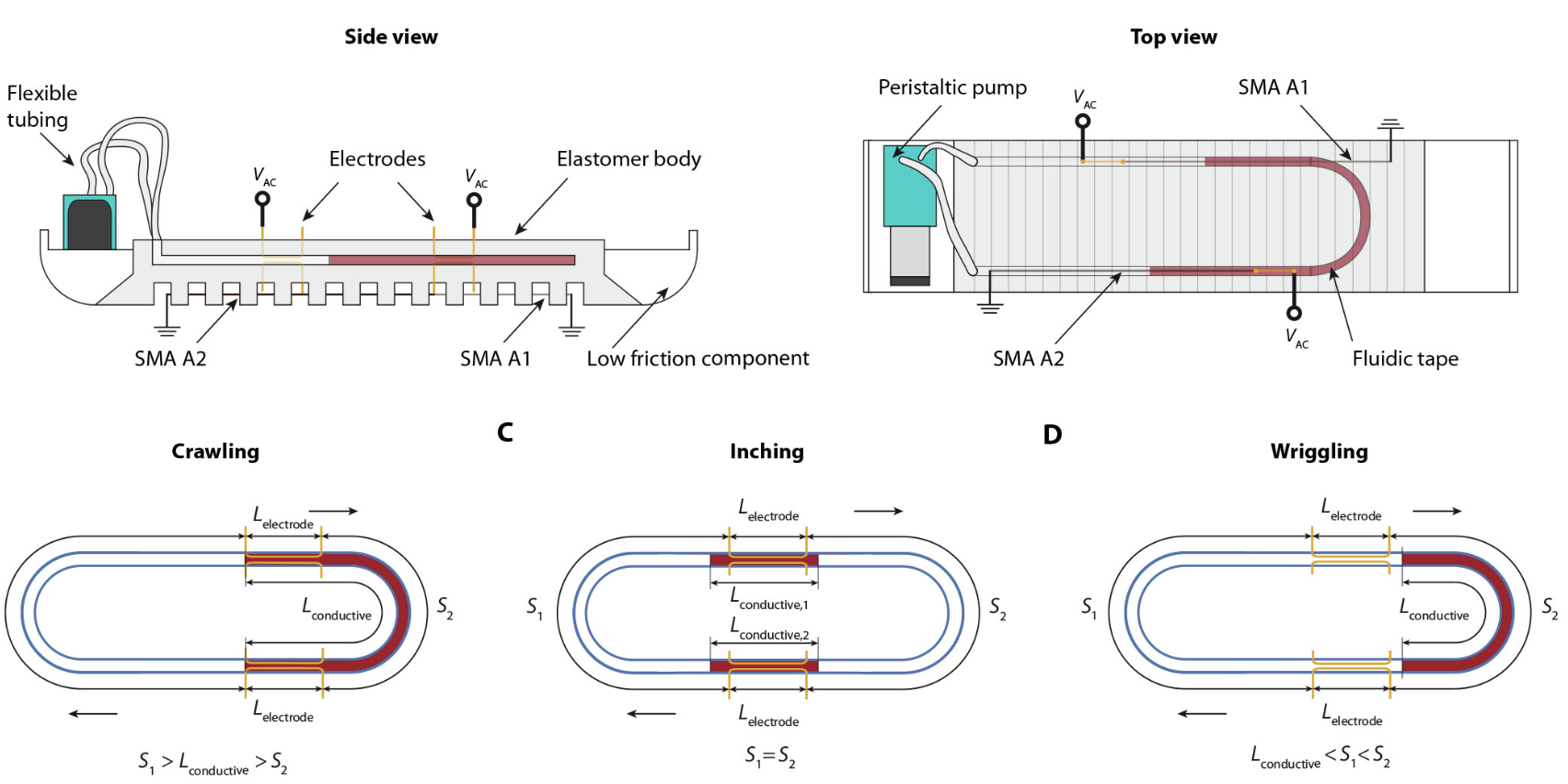
SMCs can be easily integrated into the body of a soft robot. For example, softworms [1] are powered by two shape memory alloy (SMA) actuators. These actuators contract when current flows through them; by controlling the activation pattern of the two actuators, three distinct gaits can be produced. We show that we can integrate an SMC into the body of a softworm and produce each of the three gaits by varying the programming of the SMC. The video below shows an SMC-Softworm, with the saltwater dyed red.
The SMC is not the first soft matter control system designed for soft robots. Other research groups have developed fluidic [2] and microfluidic [3, 4] control systems. These approaches, however, are limited to controlling fluidic actuators. The SMC outputs an electrical current, meaning it can interface with most soft actuators.
A grand challenge for soft robotics is the development of an autonomous and intelligent robotic system fabricated entirely out of soft materials. We believe that the SMC is an important step towards such a system, while also enabling new possibilities in environmental monitoring, smart prosthetic devices, wearable biosensing and self-healing composites.
You can read more about this work in the Science Robotics paper “A soft matter computer for soft robots”, by M. Garrad, G. Soter, A.T. Conn, H. Hauser, and J. Rossiter.
[1] Umedachi, T., V. Vikas, and B. A. Trimmer. “Softworms: the design and control of non-pneumatic, 3D-printed, deformable robots.” Bioinspiration & biomimetics 11.2 (2016): 025001.
[2] Preston, Daniel J., et al. “Digital logic for soft devices.” Proceedings of the National Academy of Sciences 116.16 (2019): 7750-7759.
[3] Wehner, Michael, et al. “An integrated design and fabrication strategy for entirely soft, autonomous robots.” Nature536.7617 (2016): 451.
[4] Mahon, Stephen T., et al. “Soft Robots for Extreme Environments: Removing Electronic Control.” 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft). IEEE, 2019.
tags: herotagrc

AUAI is supported by:









