
Robohub.org
Developing active and flexible microrobots
By C Huygelen
Leiden researchers Professor Daniela Kraft and Mengshi Wei have created microscopic robots that move without sensors, software, or external control. Instead, their behaviour emerges entirely from their shape and the way they interact with their environment. This class of robots opens up entirely new possibilities for biomedical applications.
 Close-up of the microrobot.
Close-up of the microrobot.
Inspired by nature
Inspiration to build these robots came from nature. Kraft: “Animals like worms and snakes constantly adapt their shape as they move, which helps them to navigate their environments. Macroscopic robots similarly use flexibility for their function. However, until now, microrobots were either small and rigid, or large and flexible. We wondered if we could realize small and flexible microrobots in our lab.”
Tiny, flexible, and surprisingly capable
To find out, they designed a soft, chain-like structure made up of flexibly connected segments, and printed it using a 3D microprinter. To the researchers’ surprise, switching on an electric field made the chains move. When it starts to swim, its flexibility gives it a life-like appearance.
The team had a lot of fun testing what these robots could do. “When the robot is slowed down or even stopped, it starts to wave its tail as if it wants to break free,” Wei says. “This happens, because the elements in the back still want to move, and they can do so because of their flexibility.”
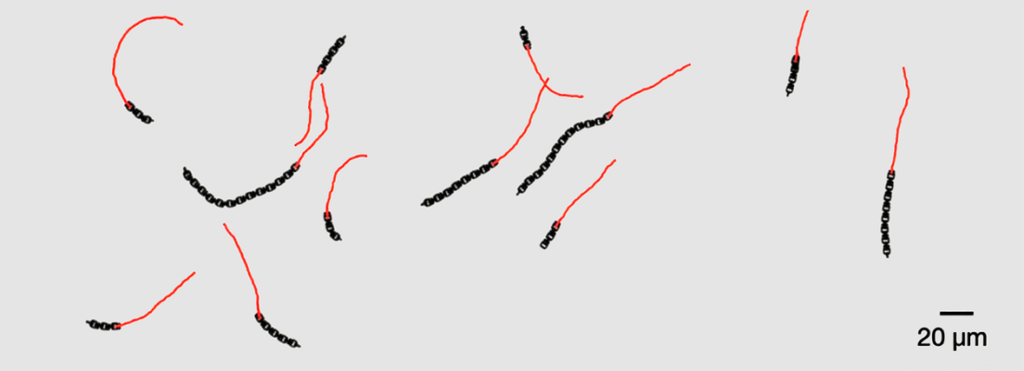
The movements these microrobots make
“But that was not all”, adds Kraft. “We discovered there’s continuous feedback between the shape and motion of the robot: the shape influences how it moves, and its movements in turn alters its shape. This microrobot therefore senses how the environment changes its body and reacts to it, making it appear life-like. This means that we don’t need microscopic electronics for integrating smart abilities.”
Wei noted that “when our microrobot encounters an obstacle, it automatically searches for another route. And when two robots meet, they naturally steer away from each other.” The robots can even move in dense environments and move objects that hinder their motion out of their way.
How the microrobots move in compex environments
Possible future research and applications
The ability of these microrobots to autonomously navigate complex environments opens exciting possibilities for biomedical applications, from targeted drug delivery to minimally invasive medical procedures and diagnostics.
Kraft: “We now need to fully understand how such dynamic and functional behavior emerge. This knowledge will help us develop more advanced microrobots and devices, but also to better understand the physics of biological microswimmers and organisms.”
Facts and figures
- Structure: A very flexible chain of self-propelling elements
- Material: Synthetic, 3D-printed in our lab on a Nanoscribe 3D-printer
- Size of the elements: 5 µm
- Size of the bar-joints: 0.5 µm*
- Movement: self propelled elements
- Speed: 7 µm/second
*To compare, a human hair is around 70-100µm thick. This is 3D-printing at the very edge of what is technically possible.
Reference
Life-like behavior emerging in active and flexible microstructures, Mengshi Wei and Daniela J. Kraft.

AUAI is supported by:









