
Robohub.org
Four influential technologies with roots in robotics
Robotics research has such strong links with several other research fields that, without it, the modern world might not have some of its most promising consumer technologies.
Robotics is truly an interdisciplinary research field. It draws lessons from other research fields, while also contributing new knowledge to those fields, some more than others. Without a long history of robotics research, we might not have many of the technologies prevalent in the world today.
Of course, it’s hard to say for sure which of the many associated technologies would still exist if robotics didn’t. Robotics “takes” more from some research fields than it “gives back”. Computer vision, for example, has been highly influenced by robotics research. However, as you can see if you look at the history of computer vision, it has largely developed on its own, in parallel to robotics, and would almost certainly exist without robotics.
However, other technologies available to the modern consumer are so strongly influenced by past robotics research that they wouldn’t exist in their current form without it.
1. Inverted Pendulums

Scene from Paul Blart: Mall Cop 2.
These days, it’s not uncommon to see everyone from tourists to security guards riding around on motorized inverted pendulums. Of course, since 2001, the inverted pendulum has been “re-branded” as the Segway, thanks to the battery powered vehicle of that name and its successors.
The theory is simple, the center-of-mass is held above a pivot point that is usually attached to motorized wheels. With Segways, this center of mass is provided by the weight of the human rider. As the system is inherently unstable, the control system for the wheels must compensate to keep the whole system upright. In this way the rider can drive the robot by simply leaning forward.

Cubli, from ETH Zurich.
Inverted pendulums have been a long-standing fixture in robotics and control theory. Since the 1960s, they have been used as a fundamental benchmark to test controller performance, as well as being used to teach control theory. Many different control methods can be used and tested, from simple PIDs to neural networks.
Even though the concept of the inverted pendulum has been around for a long time in robotics, it took until 2001 for anyone to realize its commercial possibilities. When they did, the results were staggering.
How many other, simple robotic concepts are just waiting to be turned into a successful commercial ideas?
2. LiDAR and 3D scanning
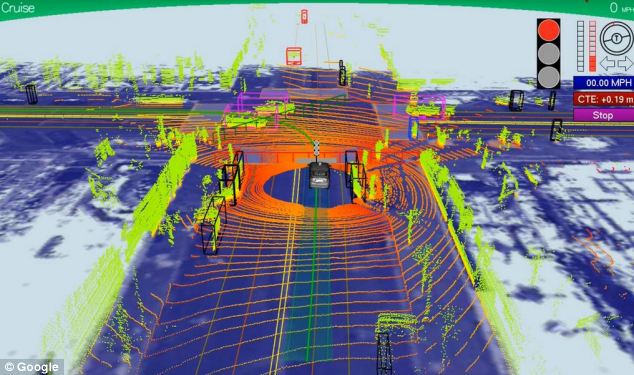
Google LIDAR map.
LiDAR (from the words “light” and “RADAR”) is the latest in the line of wave-based range sensors, which began with its predecessors: RADAR (Radio Detection and Ranging) and SONAR (Sound Navigation and Ranging).
It uses light beams — usually lasers — to create high-resolution 3D point maps. Sensors detect the distance of the target by bouncing the beam off the target and measuring how long the light takes to return to the sensor.
Although LiDAR has a long history of development apart from robotics, ranging back to the 1970s, the latest wave of LiDAR 3D scanners has been a game changer for robots. Low cost scanners, such as the Hokuyu Laser Range Finders, have finally given robots a way of reliably detecting their environment. They are now so ubiquitous that it’s rare to see a mobile robot that doesn’t have a laser scanner.
 Researchers have started to address many of the challenges that are unique to robotics, such as how to quickly detect objects from point clouds or how to manipulate objects with robotic grippers. These challenges would not have been explored by the original researchers of LiDAR technology. Robots operating in real-time need to perform calculations as quickly as possible, which has pushed the technology further than it would have progressed without robotics.
Researchers have started to address many of the challenges that are unique to robotics, such as how to quickly detect objects from point clouds or how to manipulate objects with robotic grippers. These challenges would not have been explored by the original researchers of LiDAR technology. Robots operating in real-time need to perform calculations as quickly as possible, which has pushed the technology further than it would have progressed without robotics.
This is a perfect example of robotic researchers contributing new knowledge to another research field by applying their technology to engineering problems. This knowledge then feeds back into commercial products.
3. Unmanned Aerial Vehicles (Drones)
 Drones are another example of a long-standing robotic technology that has recently been commercialized and “re-branded”, this time by the media. Drones (aka, unmanned aerial vehicles or UAVs) are flying robots and incorporate most aspects of robotics, including control systems, sensing, computer vision and navigation. Hobbyist drones are usually quadcopters, while the military drones are more like unmanned airplanes.
Drones are another example of a long-standing robotic technology that has recently been commercialized and “re-branded”, this time by the media. Drones (aka, unmanned aerial vehicles or UAVs) are flying robots and incorporate most aspects of robotics, including control systems, sensing, computer vision and navigation. Hobbyist drones are usually quadcopters, while the military drones are more like unmanned airplanes.
Quadcopters, or quadrotors, were the subject of robotic research for quite a few years before their current surge of popularity. Although four-rotor aircraft have existed since as far back as 1907, the modern quadcopter has really taken off in the last decade as electronics have reduced in size and cost. Numerous research groups use them to develop advanced control, such as collaborative mapping and autonomous navigation.
The public has mixed feelings when it comes to drones. On the one hand, they are rightly worried about the use of unmanned aerial vehicles as weapons of war. On the other hand, the public use of hobby quadcopters has skyrocketed (if you’ll excuse the pun). For example, they have revolutionized low-budget filmmaking by allowing anyone to shoot impressive aerial shots.
Drone development, which has long beencarried out by robotic researchers in labs, is now moving quickly into the commercial arena. What area of robotics is next we wonder?
4. Simultaneous Localization and Mapping (SLAM)
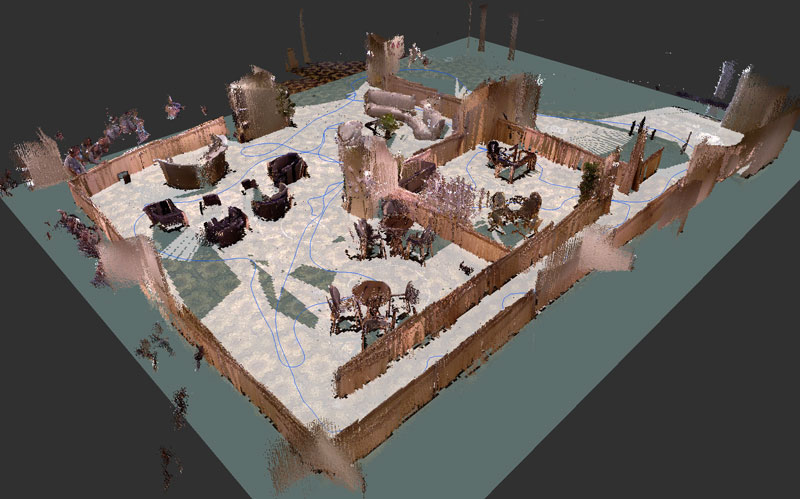
Real-time appearance-based map, based on SLAM. Image courtesy: Matthieu Mathieu Labbé
As a research field, SLAM is what we’d call “mature”, meaning it has been going on for a long time (since 1986) and any new developments in the field are relatively advanced. In other words, it is a well proven research field. However, it’s only been recently that we’re starting to see SLAM really take hold in the commercial world. Though it is not exclusively a robotic research field, it has been highly influenced by robotics and is one of the core topics in mobile robotic research.
 As it’s name suggests, the idea behind SLAM is to create a map of the robot’s environment while simultaneously calculating where within the environment the robot is located. The classic example that has moved into the consumer world is the robotic vacuum cleaner (like the Roomba), which creates a map of your house while also cleaning up and locating itself in the room.
As it’s name suggests, the idea behind SLAM is to create a map of the robot’s environment while simultaneously calculating where within the environment the robot is located. The classic example that has moved into the consumer world is the robotic vacuum cleaner (like the Roomba), which creates a map of your house while also cleaning up and locating itself in the room.
With the rise of self-driving cars, warehouse robots and location-based mobile applications, SLAM is only going to become more pervasive in the modern world. Without it, robots would find it almost impossible to operate in a human environment.
What’s Next?
The only question now is which key technology will become the next rising star to grow out of robotic research. Just like these four technologies, it will undoubtedly be something that already has a lot of research work behind it and is well proven in real applications. However, hundreds of research fields interact with robotics, while the consumer world can be fickle and unpredictable.
So we will just have to wait and see.
tags: c-Research-Innovation, cx-Consumer-Household


AUAI is supported by:









