
Robohub.org
Human-robot emotional and musical interactions: Lecture by Massimiliano Zecca
In this video lecture, Massimiliano Zecca from the Healthcare Technology and Head of the Healthcare Technology group at Loughborough University discusses emotional robotics, musical robotics and wearable bio-instrumentation. He centers his research on robotic systems and technologies that assist those in need due to advanced age or illness.
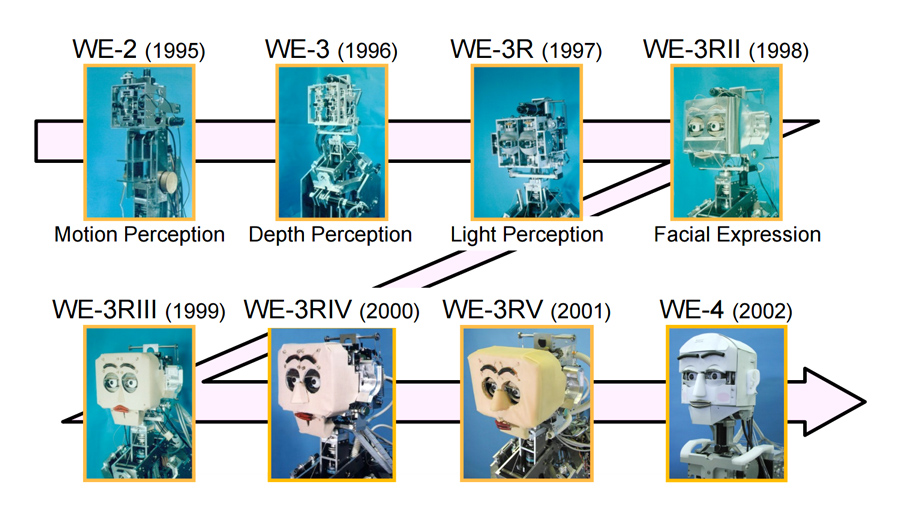
Zecca is interested in robotic systems and human interactions on an emotional level and in designing a mental model for the humanoid robot. This lead to the development of the WE-4RII robot. His second interest and research focus lies in musical robotics and making robots capable of interacting with other musicians, as if the robots were band members. This is how the Waseda flutist robot N.4 refined VI was born, followed by the Waseda saxophonist. His work also touches on how people perceive the interaction with these robots, rather than concentrating solely on advancing the technology. This brought his attention to wearable sensors for humans, where the data collected is directly fed to robots for interpretation.
Zecca explores issues such as how people feel about interacting with the robot on an emotional level, how the robots interact within groups, and how can they “sense” what humans feel during the interaction.
Download the PDF presentation here.

Massimiliano Zecca holds a Ph.D. in Biomedical Robotics from the Scuola Superiore Sant’Anna, Pisa, (Italy), and currently teaches Healthcare Technology at Loughborough University (UK), where he also leads the Wearable BioRobotics research group.
He is a member of the National Centre for Sport and Exercise Medicine in the East Midlands, and of the NIHR Leicester-Loughborough Diet, Lifestyle and Physical Activity Biomedical Research Unit.
Zecca M. IJARS Video Series: Human-Robot Emotional and Musical Interactions [online video]. International Journal of Advanced Robotic Systems, 2015, 12:V3. DOI: 10.5772/60801
tags: c-Research-Innovation, cx-Arts-Entertainment, robohub focus on arts and entertainment, UK
AUAI is supported by:









