
Robohub.org
New soft robots really suck: Vacuum-powered systems empower diverse capabilities
Recent advances in soft robotics have seen the development of soft pneumatic actuators (SPAs) to ensure that all parts of the robot are soft, including the functional parts. These SPAs have traditionally used increased pressure in parts of the actuator to initiate movement, but today a team from NCCR Robotics and RRL, EPFL publish a new kind of SPA, one that uses vacuum, in ScienceRobotics.
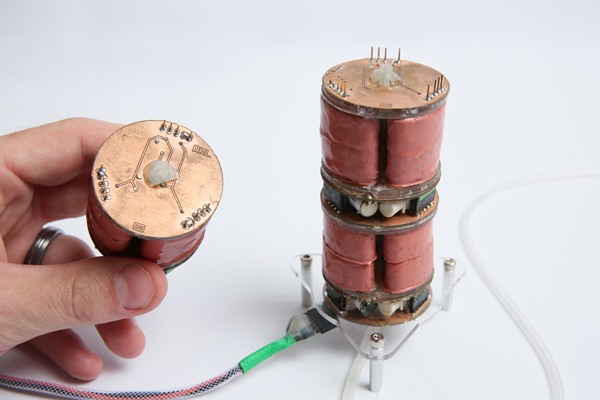
The new vacuum-powered Soft Pneumatic Actuator (V-SPA) is soft, lightweight and very easy to fabricate. By using foam and coating it with layers of silicone-rubber, the team have created an actuator that can be made using off the shelf parts without the need for molds – in fact, it takes just two hours to manufacture the V-SPA.
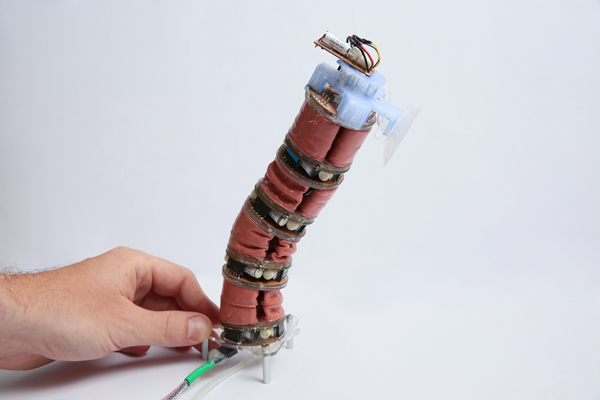
Once produced, the actuators were combined into plug-and-play “V-SPA Modules” which created a simplified design of soft pneumatic robots with many degrees of freedom. In fact, the team created reconfigurable, modular robots using these modules, where every function of the robot was powered by a single shared vacuum source, enabling many different types of capabilities, such as multiple forms of ground locomotion, vertical climbing, object manipulation and stiffness changing.
To test the new modular robot, the team added a suction arm which used the vacuum pump to pick up and move a series of objects, a task that was completed by turning on suction when an object should be carried and allowing the arm to refill with air when the object should be released. Further validation came through attaching suction cups to the robot and using it to climb up a vertical window and using the robot to walk using a number of different gaits (either through use of waves, like a snake, or rolling).
By creating a soft, lightweight actuator that can move in any direction the team hope to enable a new generation of truly soft, compliant robots that can interact safely with the humans that use them.
Reference
M. A. Robertson and J. Paik, “New soft robots really suck: vacuum powered systems empower diverse capabilities,” Science Robotics. doi/10.1126/scirobotics.aan6357
tags: c-Research-Innovation, herotagrc, Jamie Paik

AUAI is supported by:









