
Robohub.org
Robocars at CES: Mercedes concept

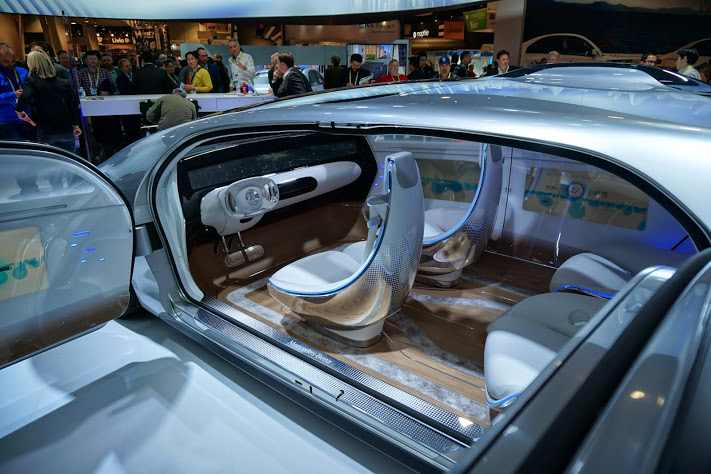
There is reasonable volume of robocar related stuff to see here at CES. I just had a few hours today, and went to see the much touted Mercedes F105 “Luxury in Motion.” This is a concept, and not a planned vehicle, but it draws together a variety of ideas — most of which we’ve seen before — with some new explorations.
The vehicle has a long wheelbase design to allow it to have a very large passenger compartment, which features just four bucket seats, the front two of which can rotate to create face to face seating. (In addition, they can rotate to make it easier to get into the car.) We’ve seen a number of face to face concepts and designs and I’ve been interested in the idea from the start: the idea of making car travel more social and better for both families and co-workers. As a plus, rear facing seats, though less comfortable for some fraction of the population, are going to be safer in a front end collision.
The vehicle features a bevy of giant touchscreens. We see a lot of this, but I will note that we don’t have this at our desks or in our homes. I suspect passengers in robocars will prefer the tablets they already have, though there is the issue that looking down at a tablet generates motion sickness sometimes.
The interior has an odd mix of carpet and hardwood, perhaps trying to be more like a living room.
More interesting, though not on display, are the vehicle’s systems for communicating with pedestrians and other road users. These include LEDs that can indicate if the car is self-driving (boring, and something I pushed to have removed from the Nevada law,) but more interesting are indicators that help to tell pedestrians the vehicle has seen them. In one feature, which only is likely to work at night, a laser projects a crosswalk in front of the vehicle when it stops, in order to tell a pedestrian it sees them and is expecting them to cross in front. It can also make LED words at the back for other cars (something that is I think illegal in some jurisdictions).
Also interesting has been the press reaction. WIRED thinks it’s bonkers and not designed very well. The bonkers part is because the writer thinks it de-emphasizes driving too much. Of course, those of that stripe are quite upset at Google’s car with no controls. Other writers have liked the design, and find it quite superior to Google’s non-threatening design, suggesting the Google design is for regulators and the Mercedes design is for customers. Google plans to get approval for their car and operate it, while Mercedes is just using the F105 as a concept.
I have a gallery of several pictures of the car that I will add to during the week. In the gallery you will also see:
Audio Piloted Driving prototype
Audi drove one of their cars from the Bay Area to CES, letting the press take 100 mile stints. It also helped them learn things about different conditions. One prototype is in the booth, and I will go out to see the real car outdoors tomorrow.
TRW
TRW was showing off their technology with a transparent model showing where they had put an array of radars to make 360 degree radar and camera coverage. No LIDAR, but they will probably get one eventually. Radar’s resolution is low, but they believe that by fusing the radar and the camera views they can get very good perception of the road.
Others
There are more for me to see tomorrow. Ford showed more of their ADAS systems and also their Focus, which has 4 of the 32 plane velodyne LIDARs on it. Toyota showed only a hydrogen fuel cell car. Valeo has some interesting demos I will want to see — they have promised doing a good traffic jam assist. While they have not said so, I think the most interesting car company robocar function will be a traffic jam assist that does not require supervision — ie. you can read.
While no car company is ready to have the driver out of the loop at high speeds, do so at traffic jam speeds is much easier, mainly because you just have to follow the other cars, and you stop self-driving if the jam opens up. Several companies are working on a product like this and I suspect it will be the first real robocar product to reach the market that is actually practical. The “super cruise” products that drive while you watch are pleasant, but not much more world-changing than adaptive cruise control. When a car can give people time back, even if only traffic jam time, something interesting starts happening.
A version of this article originally appeared on robocars.com.
If you liked this article, you may also be interested in:
- Future driving: Business models for robocars
- Pure autonomy: Google’s new purpose-built self driving car
- Robots Podcast: Mobility Transformation Facility
- Robocars: A natural fit for retirement communities
See all the latest robotics news on Robohub, or sign up for our weekly newsletter.
tags: Automotive, autonomous driving, c-Events, CES 2015, Prototype, robocars, robohub focus on autonomous driving

AUAI is supported by:









