
Robohub.org
227
RoboUniverse 2016: Agricultural Robotics with Dan Harburg and Matthew Borzage


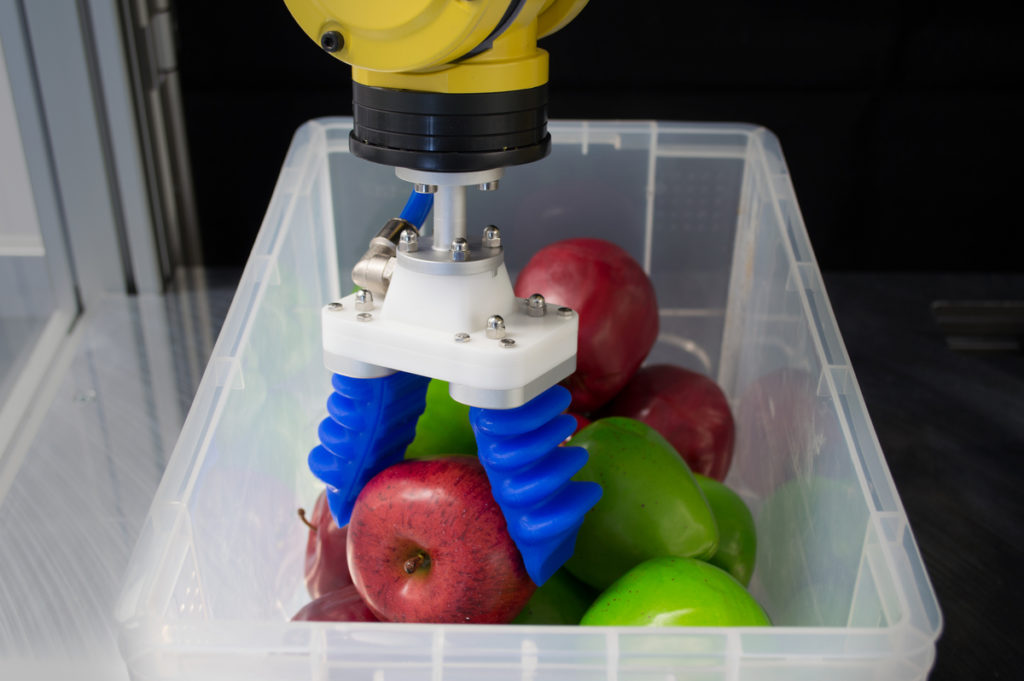
In this episode, Abate De Mey interviews two speakers from the Agricultural track of the RoboUniverse 2016 conference in San Diego: Dan Harburg of Soft Robotics Inc. and Matthew Borzage of BioTac. Borzage and Harburg discuss their distinct approaches to advancing gripping technology in Agriculture. Borzage stresses the importance of tactile sensing while Harburg pushes for low cost, soft grippers with no on-board sensors.
Dan Harburg
 Dan Harburg is the Director of Business Development at Soft Robotics Inc., a venture-backed startup company developing a soft end-of-arm tool for the food industry. Harburg was previously an entrepreneur-in-residence at North Bridge Venture Partners, working with scientists at Harvard, MIT, and the University of Illinois to commercialize technologies at the intersection of materials, medicine, and advanced manufacturing.
Dan Harburg is the Director of Business Development at Soft Robotics Inc., a venture-backed startup company developing a soft end-of-arm tool for the food industry. Harburg was previously an entrepreneur-in-residence at North Bridge Venture Partners, working with scientists at Harvard, MIT, and the University of Illinois to commercialize technologies at the intersection of materials, medicine, and advanced manufacturing.
Matthew Borzage
 Matthew Borzage is a co-founder and the Head of Business Development for SynTouch. Borzage has a background in biomedical and medical device engineering and sales. As Head of Business Development, Matt is interested in how tactile sensing can be used in robotics and prosthesis.
Matthew Borzage is a co-founder and the Head of Business Development for SynTouch. Borzage has a background in biomedical and medical device engineering and sales. As Head of Business Development, Matt is interested in how tactile sensing can be used in robotics and prosthesis.
Links
- Soft Robotics Inc.
- Bakery Automation with a Soft Touch
- SynTouch Inc.
- Biomimetic Design of BioTac
- Download Episode (16.2 MB)
tags: Actuation, Environment-Agriculture, Manipulation




