
Robohub.org
Solar powered day/night autonomous flight achieved: Airborne for 28 hours without fuel!
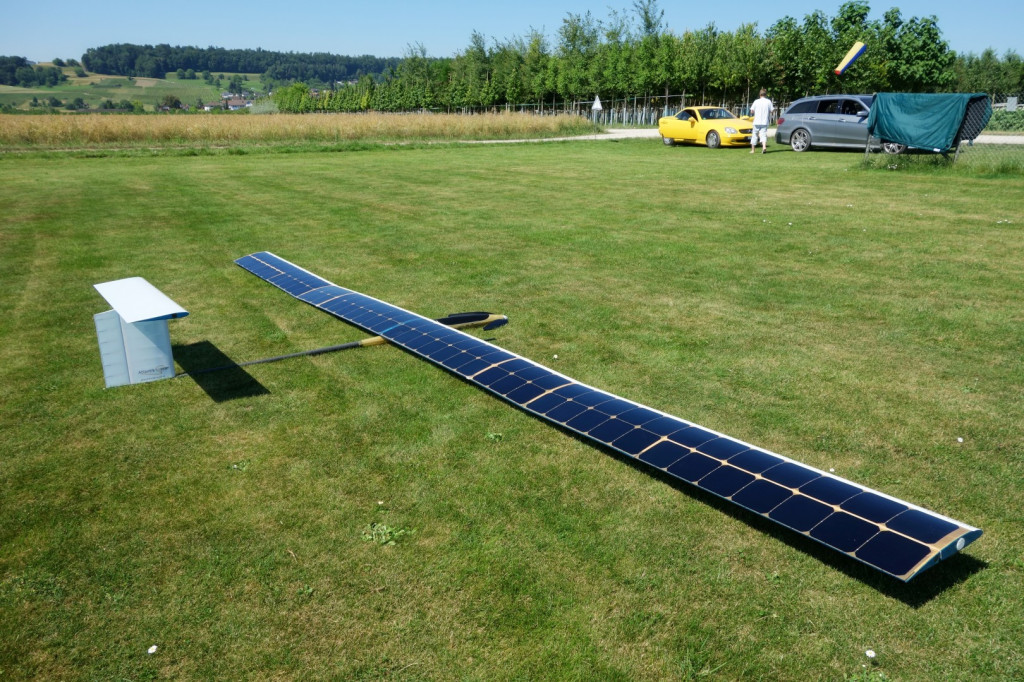
 The AtlantikSolar Unmanned Aerial Vehicle took off on June 30th, 2015 at 11:14 o’clock to attempt the “holy grail” of solar-powered flight: the crossing of a full day-night cycle on solar power alone. More than 28 hours later, on July 1st at 15:35, the aircraft landed safely and with fully recharged batteries, thus showing AtlantikSolar’s long-endurance flight capability. This is of significant interest for large-scale disaster support, industrial inspection or meteorological observation missions, especially in the compact form of a hand-launchable 7kg UAV such as AtlantikSolar.
The AtlantikSolar Unmanned Aerial Vehicle took off on June 30th, 2015 at 11:14 o’clock to attempt the “holy grail” of solar-powered flight: the crossing of a full day-night cycle on solar power alone. More than 28 hours later, on July 1st at 15:35, the aircraft landed safely and with fully recharged batteries, thus showing AtlantikSolar’s long-endurance flight capability. This is of significant interest for large-scale disaster support, industrial inspection or meteorological observation missions, especially in the compact form of a hand-launchable 7kg UAV such as AtlantikSolar.
The flight was performed at the Rafz RC-model club airfield in excellent sun conditions. After take-off at 11:14, with batteries charged to 57%, the aircraft was quickly setup to follow an efficient and fully-autonomous loitering path, which allowed a completed battery-charge by 14:08 o’clock.

The midday and afternoon were characterized by strong thermal up- and downdrafts, but enough power was generated by the solar panels to keep the batteries full. Their discharge started only when the sun slowly went down at around 19:30.
The night flight provided calm conditions, with the autopilot keeping the aircraft stable despite horizontal winds of up to 5m/s, and the safety pilots keeping a good eye on the aircraft using its position indicator lights. Flying at an average airspeed of 8.4m/s (the point of minimum sink rate) and an average power consumption of 43W during the night, the aircraft received first sun at around 5:50 o’clock, and maintained a minimum charge of around 35% until the solar modules regenerated enough power to stay airborne.
After 24 hours of continuous flight, the aircraft had recharged its batteries to 84%, a significantly higher state-of-charge than the day before. The batteries were in fact fully charged by 12:43 o’clock – one hour and twenty-five minutes earlier than the day before.

AtlantikSolar landed safely at 15:35, thereby setting a new Swiss endurance record for unmanned solar-powered flight, and improving upon the previous internal record (ASL’s Sky Sailor) by a over an hour.
The project’s next goal is to extend the flight duration to more than 80 hours (3 days), in order to beat the old endurance record for solar-powered UAVs below 20kg (48h flight by the 13kg SoLong UAV in 2005) by more than a day. If it is able to achieve an 80-hour flight endurance, the 7kg AtlantikSolar would be the third-longest flying aircraft in the world, only behind Airbus Space’s 53kg Zephyr and the 2300kg Solar Impulse 2.
We’d like to thank everybody who made this flight possible — including all project partners and collaborators, the Rafz Model airfield club, and our safety pilots — for working so hard and making this big step in the project possible.
The AtlantikSolar project was developed at the Autonomous Systems Lab at ETH Zurich.
tags: AtlantikSolar, c-Aerial, cx-Research-Innovation, ETH Zurich, Switzerland, UAVs

AUAI is supported by:









